Download
1 / 31
310 likes | 332 Views
Learn about the IRAM and ISTORE projects that aim to provide efficient access to high memory bandwidth and address key scaling issues for embedded, portable, and storage applications.

E N D
IRAM and ISTORE Projects Aaron Brown, James Beck, Rich Fromm, Joe Gebis, Paul Harvey, Adam Janin, Dave Judd, Kimberly Keeton, Christoforos Kozyrakis, David Martin, Rich Martin, Thinh Nguyen, David Oppenheimer, Steve Pope, Randi Thomas, Noah Treuhaft, Sam Williams, John Kubiatowicz, Kathy Yelick, and David Patterson http://iram.cs.berkeley.edu/[istore] Fall 2000 DIS DARPA Meeting
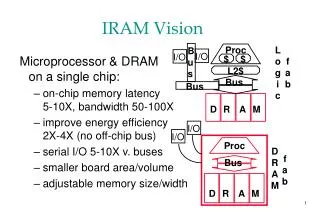
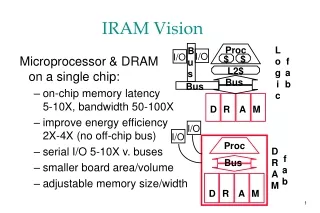
IRAM and ISTORE Vision • Integrated processor in memory provides efficient access to high memory bandwidth • Two “Post-PC” applications: • IRAM: Single chip system for embedded and portable applications • Target media processing (speech, images, video, audio) • ISTORE: Building block when combined with disk for storage and retrieval servers • Up to 10K nodes in one rack • Non-IRAM prototype addresses key scaling issues: availability, manageability, evolution Photo from Itsy, Inc.
Data Cache (8KB) IRAM Overview • A processor architecture for embedded/portable systems running media applications • Based on media processing and embedded DRAM • Simple, scalable, energy and area efficient • Good compiler target Flag 0 Flag 1 Instr Cache (8KB) FPU Flag Register File (512B) MIPS64™ 5Kc Core CP IF Arith 0 Arith 1 256b 256b SysAD IF Vector Register File (8KB) 64b 64b Memory Unit TLB 256b JTAG IF DMA Memory Crossbar … JTAG DRAM0 (2MB) DRAM1 (2MB) DRAM7 (2MB)
Architecture Details • MIPS64™ 5Kc core (200 MHz) • Single-issue scalar core with 8 Kbyte I&D caches • Vector unit (200 MHz) • 8 KByte register file (32 64b elements per register) • 256b datapaths, can be subdivided into 16b, 32b, 64b: • 2 arithmetic (1 FP, single), 2 flag processing • Memory unit • 4 address generators for strided/indexed accesses • Main memory system • 8 2-MByte DRAM macros • 25ns random access time, 7.5ns page access time • Crossbar interconnect • 12.8 GBytes/s peak bandwidth per direction (load/store) • Off-chip interface • 2 channel DMA engine and 64n SysAD bus
14.5 mm 20.0 mm Floorplan • Technology: IBM SA-27E • 0.18mm CMOS, 6 metal layers • 290 mm2 die area • 225 mm2 for memory/logic • Transistor count: ~150M • Power supply • 1.2V for logic, 1.8V for DRAM • Typical power consumption: 2.0 W • 0.5 W (scalar) + 1.0 W (vector) + 0.2 W (DRAM) + 0.3 W (misc) • Peak vector performance • 1.6/3.2/6.4 Gops wo. multiply-add (64b/32b/16b operations) • 3.2/6.4 /12.8 Gops w. madd • 1.6 Gflops (single-precision) • Tape-out planned for March ‘01
“VIRAM-8MB” 4 lanes, 8 Mbytes 190 mm2 3.2 Gops at 200 MHz(32-bit ops) Alternative Floorplans “VIRAM-2Lanes” 2 lanes, 4 Mbytes 120 mm2 1.6 Gops at 200 MHz “VIRAM-Lite” 1 lane, 2 Mbytes 60 mm2 0.8 Gops at 200 MHz
VIRAM Compiler • Based on the Cray’s production compiler • Challenges: • narrow data types and scalar/vector memory consistency • Advantages relative to media-extensions: • powerful addressing modes and ISA independent of datapath width Frontends Optimizer Code Generators C T3D/T3E Cray’s PDGCS C++ C90/T90/SV1 Fortran95 SV2/VIRAM
Exploiting 0n-Chip Bandwidth • Vector ISA uses high bandwidth to mask latency • Compiled matrix-vector multiplication: 2 Flops/element • Easy compilation problem; stresses memory bandwidth • Compare to 304 Mflops (64-bit) for Power3 (hand-coded) • Performance scales with number of lanes up to 4 • Need more memory banks than default DRAM macro for 8 lanes
Compiling Media Kernels on IRAM • The compiler generates code for narrow data widths, e.g., 16-bit integer • Compilation model is simple, more scalable (across generations) than MMX, VIS, etc. • Strided and indexed loads/stores simpler than pack/unpack • Maximum vector length is longer than datapath width (256 bits); all lane scalings done with single executable
IRAM Status • Chip • ISA has not changed significantly in over a year • Verilog complete, except SRAM for scalar cache • Testing framework in place • Compiler • Backend code generation complete • Continued performance improvements, especially for narrow data widths • Application & Benchmarks • Handcoded kernels better than MMX,VIS, gp DSPs • DCT, FFT, MVM, convolution, image composition,… • Compiled kernels demonstrate ISA advantages • MVM, sparse MVM, decrypt, image composition,… • Full applications: H263 encoding (done), speech (underway)
Scaling to 10K Processors • IRAM + micro-disk offer huge scaling opportunities • Still many hard system problems (AME) • Availability • systems should continue to meet quality of service goals despite hardware and software failures • Maintainability • systems should require only minimal ongoing human administration, regardless of scale or complexity • Evolutionary Growth • systems should evolve gracefully in terms of performance, maintainability, and availability as they are grown/upgraded/expanded • These are problems at today’s scales, and will only get worse as systems grow
VAX crashes ‘85, ‘93 [Murp95]; extrap. to ‘01 • HW/OS 70% in ‘85 to 28% in ‘93. In ‘01, 10%? Is Maintenance the Key? • Rule of Thumb: Maintenance 10X HW • so over 5 year product life, ~ 95% of cost is maintenance
Hardware Techniques for AME • Cluster of Storage Oriented Nodes (SON) • Scalable, tolerates partial failures, automatic redundancy • Heavily instrumented hardware • Sensors for temp, vibration, humidity, power, intrusion • Independent diagnostic processor on each node • Remote control of power; collects environmental data for • Diagnostic processors connected via independent network • On-demand network partitioning/isolation • Allows testing, repair of online system • Managed by diagnostic processor • Built-in fault injection capabilities • Used for hardware introspection • Important for AME benchmarking
Storage-Oriented Node “Brick” Portable PC CPU: Pentium II/266 + DRAM Redundant NICs (4 100 Mb/s links) Diagnostic Processor • ISTORE Chassis • 80 nodes, 8 per tray • 2 levels of switches: • 20 100 Mb/s • 2 1 Gb/s • Environment Monitoring: • UPS, redundant PS, • fans, heat and vibration sensors... Disk Half-height canister ISTORE-1 system Hardware: plug-and-play intelligent devices with self-monitoring, diagnostics, and fault injection hardware • intelligence used to collect and filter monitoring data • diagnostics and fault injection enhance robustness • networked to create a scalable shared-nothing cluster Scheduled for 4Q 00
Brick shelf Brick shelf Brick shelf Brick shelf Brick shelf Brick shelf Brick shelf Brick shelf Brick shelf Brick shelf Patch panel Patch panel Patch panel Patch panel ISTORE-1 System Layout PE1000s PE1000s: PowerEngines 100Mb switches PE5200s: PowerEngines 1 Gb switches UPSs: “used” PE5200 PE5200 UPS UPS UPS UPS UPS UPS
ISTORE Brick Node Block Diagram Mobile Pentium II Module SCSI North Bridge CPU Disk (18 GB) South Bridge Diagnostic Net DUAL UART DRAM 256 MB Super I/O Monitor & Control Diagnostic Processor BIOS Ethernets 4x100 Mb/s PCI • Sensors for heat and vibration • Control over power to individual nodes Flash RTC RAM
ISTORE Brick Node • Pentium-II/266MHz • 256 MB DRAM • 18 GB SCSI (or IDE) disk • 4x100Mb Ethernet • m68k diagnostic processor & CAN diagnostic network • Packaged in standard half-height RAID array canister
Software Techniques • Reactive introspection • “Mining” available system data • Proactive introspection • Isolation + fault insertion => test recovery code • Semantic redundancy • Use of coding and application-specific checkpoints • Self-Scrubbing data structures • Check (and repair?) complex distributed structures • Load adaptation for performance faults • Dynamic load balancing for “regular” computations • Benchmarking • Define quantitative evaluations for AME
Network Redundancy • Each brick node has 4 100Mb ethernets • TCP striping used for performance • Demonstration on 2-node prototype using 3 links • When a link fails, packets on that link are dropped • Nodes detect failures using independent pings • More scalable approach being developed Mb/s
Load Balancing for Performance Faults • Failure is not always a discrete property • Some fraction of components may fail • Some components may perform poorly • Graph shows effect of “Graduated Declustering” on cluster I/O with disk performance faults
Availability benchmarks • Goal: quantify variation in QoS as fault events occur • Leverage existing performance benchmarks • to generate fair workloads • to measure & trace quality of service metrics • Use fault injection to compromise system • Results are most accessible graphically
Example: Faults in Software RAID • Compares Linux and Solaris reconstruction • Linux:minimal performance impact but longer window of vulnerability to second fault • Solaris: large perf. impact but restores redundancy fast Linux Solaris
Towards Manageability Benchmarks • Goal is to gain experience with a small piece of the problem • can we measure the time and learning-curve costs for one task? • Task: handling disk failure in RAID system • includes detection and repair • Same test systems as availability case study • Windows 2000/IIS, Linux/Apache, Solaris/Apache • Five test subjects and fixed training session • (Too small to draw statistical conclusions)
Sample results: time • Graphs plot human time, excluding wait time
Analysis of time results • Rapid convergence across all OSs/subjects • despite high initial variability • final plateau defines “minimum” time for task • plateau invariant over individuals/approaches • Clear differences in plateaus between OSs • Solaris < Windows < Linux • note: statistically dubious conclusion given sample size!
ISTORE Status • ISTORE Hardware • All 80 Nodes (boards) manufactured • PCB backplane: in layout • Finish 80 node system: December 2000 • Software • 2-node system running -- boots OS • Diagnostic Processor SW and device driver done • Network striping done; fault adaptation ongoing • Load balancing for performance heterogeneity done • Benchmarking • Availability benchmark example complete • Initial maintainability benchmark complete, revised strategy underway
BACKUP SLIDES IRAM
IRAM Latency Advantage • 1997 estimate: 5-10x improvement • No parallel DRAMs, memory controller, bus to turn around, SIMM module, pins… • 30ns for IRAM (or much lower with DRAM redesign) • Compare to Alpha 600: 180 ns for 128b; 270 ns for 512b • 2000 estimate: 5x improvement • IRAM memory latency is 25 ns for 256 bits, fixed pipeline delay • Alpha 4000/4100: 120 ns
IRAM Bandwidth Advantage • 1997 estimate: 100x • 1024 1Mbit modules, each 1Kb wide(1Gb chip) • 10% @ 40 ns RAS/CAS = 320 GBytes/sec • If cross bar switch or multiple busses deliver 1/3 to 2/3 of total Þ 100 - 200 GBytes/sec • Compare to: AlphaServer 8400 = 1.2 GBytes/sec, 4100=1.1 Gbytes/sec • 2000 estimate: 10-100x • VIRAM-1 16 MB chip divided into 8 banks => 51.2 GB peak from memory banks • Crossbar can consume 12.8 GB/s • 6.4GB/s from Vector Unit + 6.4 GB/s from either scalar or I/O
Power and Energy Advantages • 1997 Case study of StrongARM memory hierarchy vs. IRAM memory hierarchy • cell size advantages Þ much larger cacheÞ fewer off-chip references Þ up to 2X-4X energy efficiency for memory-intensive algorithms • less energy per bit access for DRAM • Power target for VIRAM-1 • 2 watt goal • Based on preliminary spice runs, this looks very feasible today • Scalar core included
Summary • IRAM takes advantage of high on-chip bandwidth • Vector IRAM ISA utilizes this bandwidth • Unit, strided, and indexed memory access patterns supported • Exploits fine-grained parallelism, even with pointer chasing • Compiler • Well-understood compiler model, semi-automatic • Still some work on code generation quality • Application benchmarks • Compiled and hand-coded • Include FFT, SVD, MVM, sparse MVM, and other kernels used in image and signal processing