Download

1 / 27
300 likes | 1.01k Views
MEMS センサを用いた 小型 INS/GPS 航法装置 の開発. 56367 成岡 優 指導教員 : 土屋助教授. 概要. 背景 : 小型、軽量、安価かつ高精度な航法装置の必要性 手法 評価 : 精度 はどれくらいか ? 結論. 背景 (1/5) 高精度な航法データの必要性. 多くのアプリケーションて精度よい航法情報 ( 位置や速度、姿勢 ) が必要とされる 飛行機や宇宙機のナビゲーション 車や電車等の移動体の監視 ロボットや UAV の誘導制御. 航空機で培われたナビゲーション技術 を 汎用的に利用することはできないか ?.

E N D
MEMSセンサを用いた小型INS/GPS航法装置の開発 56367 成岡 優 指導教員: 土屋助教授
概要 • 背景: 小型、軽量、安価かつ高精度な航法装置の必要性 • 手法 • 評価: 精度はどれくらいか? • 結論 修士輪講会2006
背景 (1/5)高精度な航法データの必要性 • 多くのアプリケーションて精度よい航法情報(位置や速度、姿勢)が必要とされる • 飛行機や宇宙機のナビゲーション • 車や電車等の移動体の監視 • ロボットやUAVの誘導制御 航空機で培われたナビゲーション技術を 汎用的に利用することはできないか? 修士輪講会2006
背景 (2/5)優れた航空機の航法技術の1つとしてINS/GPS • INS/GPS複合航法 慣性航法装置 (INS) Global Positioning System (GPS) + 早い更新周期 but 誤差が蓄積 誤差が蓄積しない but 更新周期が低い 早い更新周期 and 誤差蓄積しない 修士輪講会2006
背景 (3/5)INS/GPSの仕組み 運動の法則 三角測量 INS GPS 慣性センサ 受信機 加速度 角速度 位置 速度 姿勢 衛星 位置 速度 電波 統合 INS/GPS 位置, 速度, 姿勢 修士輪講会2006
航空機向け(既存) 汎用向け(近年開発中) 背景 (4/5)航空機 vs. 汎用 INS/GPS 高精度? 超高精度 (誤差: <1m, <1deg) Trade-Off 着目点 大きい(> 1000cm3) 重い(> 1 kg) 小さい (< 1000cm3) 軽い (< 1 kg) 飛行機、宇宙機のみ! 安価 (< 100万円) 高価 (> 100万円) 修士輪講会2006
背景 (5/5)研究目的 • 精度とその他スペックの間に存在するトレードオフを議論することは非常に重要である • 本研究の目的 • できる限り小さく、軽く、安価なINS/GPS装置を構成し • その精度を正確に評価し、汎用的に使用可能か検討する 修士輪講会2006
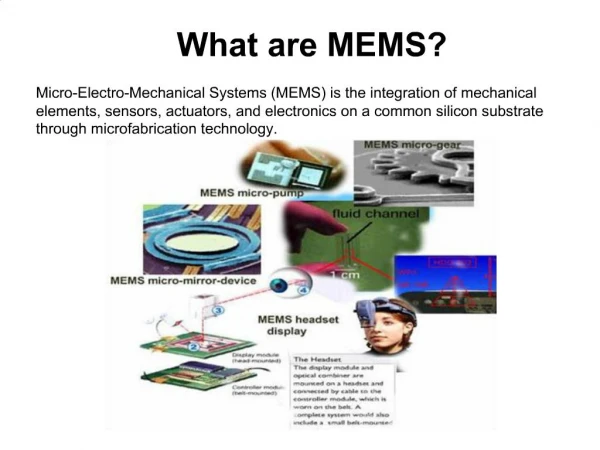
高精度だが大きく重く高価な特殊部品 Ring laser gyro 軍用、特殊用GPS 小さく軽く安価な汎用部品 MEMS慣性センサ 民生用GPS 手法 (1/7)構成機器 使用しない 使用する 修士輪講会2006
手法 (2/7)MEMSセンサと民生用GPS • MEMS慣性センサ • 電気回路と検出部を一体化 • 小さく(~1cm2),軽く(<1 g),安価(<1万円) • MEMS慣性センサを用いたINSは誤差が非常に早く溜まりやすい. • 民生用GPS受信機 • カーナビなどに使われている • 小さく(~10 cm2),軽く(<10g),安価(~1万円) • 比較的よい精度 (位置誤差: 10~20m) 修士輪講会2006
手法 (3/7)INS/GPSアルゴリズム • Strap-down構成 • 機械的なジンバルが必要ない • extended Kalman filtering (EKF)による統合 • Loose-coupling: 計算リソースの節約 • クォータニオンの活用 • MEMSセンサの大きな誤差を補償するための数学的に単純なモデル • オイラー角で発生するような特異点を完全に除去 修士輪講会2006
手法 (4/7)式(1) : INS運動方程式 • 速度 (3[North, East, Down Speed] 状態量) Acceleration Gravity • 位置 (4[Latitude, Longitude, Azimuth] + 1[Height] = 5 状態量) quaternion • 姿勢 (4[Roll, Pitch, Heading] 状態量) Angular Speed 修士輪講会2006
手法 (5/7)式(2) : EKF向け線形化 INS運動方程式に以下の代入をすることでEKF用の線形化が完了する quaternion 大きさを維持したままのクォータニオンの線形化 • Jacobian i.e. 足し算型 (4 状態量) • 掛け算型 (3 状態量) 修士輪講会2006
EKF Time Update EKF Correct 手法 (6/7)式(3) : EKF INSが時間更新するとき GPSから情報が得られたとき quaternion 修士輪講会2006
手法 (7/7)全体図 Strap-down構成 MEMS 慣性センサ クォータニオンの利用 民生用GPS 修士輪講会2006
評価 (1/11)概要 • プロトタイプ • 提案手法に基づいて作成 • 較正を行う • 精度評価試験 • プロトタイプと高精度な既存航法装置の比較 修士輪講会2006
評価 (2/11)プロトタイプ 大きさ: ~ 100 cm3 重さ: ~ 30 g 費用: ~ 3万円 (構造部材ぬきで) 小さく、軽く、安価である 修士輪講会2006
評価 (3/11)プロトタイプ詳細 修士輪講会2006
温度ドリフト 取付け誤差 評価 (4/11)MEMS INSの較正 rotating settling 容易に取り除ける誤差要因の中で最も効果が大きい 修士輪講会2006
温度ドリフト 取付け誤差 評価 (5/11)較正結果 • 温度ドリフトと取付け誤差の測定結果 傾いている 傾いている Y,Z X 温度 真の角速度 (X軸) vs. vs. 検出加速度 (X-軸 加速度計) 検出角速度 (X, Y, Z-軸 ジャイロ) 修士輪講会2006
評価 (6/11)精度評価試験 • GAIAとの比較 (2006/06) • GAIA: JAXAによって開発された超高精度なINS/GPS装置、誤差は絶対位置で < 1m • 同JAXA所有の実験用航空機 MuPAL-a内にプロトタイプとGAIAを設置 • 飛行し、両者の履歴を比較 修士輪講会2006
評価 (7/11)実景風景 GAIA MuPAL-a プロトタイプ 修士輪講会2006
評価 (8/11)試験結果 プロトタイプ: 赤 GAIA: 緑 速度 位置 (3D) 姿勢 GAIAとほぼ等しい 修士輪講会2006
評価 (9/11)結果詳細 GAIAを基準としたときの プロトタイプの誤差の統計量 位置 < 10m 速度 < 2 deg 姿勢 > 10 deg 修士輪講会2006
評価 (10/11)試験結果のまとめと考察 • 誤差: < 10 m(位置), < 2 deg(ロール、ピッチ) • 汎用的に使用するのに十分な精度と考えられる • ヘディングが特に悪い (誤差: >10 deg) • 運動の周波数モードの影響が考えられる • ロールやピッチは比較的高い周波数の運動 (> 1Hz) • 一方ヘディングは周波数の低い運動 (< 1 Hz) • 除去が難しい周波数の低いノイズ成分、例えばゼロ点変動と重なってしまっている 修士輪講会2006
較正あり 較正なし 評価 (11/11)較正の効果 例 : ロール履歴 較正の効果を確認できる 修士輪講会2006
結論 • 提案した手法とその結果 • 汎用的利用を目指した小さく、軽く、安価なINS/GPSを提案した • MEMS慣性センサと民生用GPS受信機を構成機器とし、Strap-down構成をとった • アルゴリズムではEKFとQuaternionを利用した • 温度ドリフトと取付け誤差を較正し、その効果を確認した • 試験結果によると、汎用利用には十分な精度を有する、誤差は位置で10 m以内、ロールとピッチで2度以内であった 修士輪講会2006
今後の課題 • 低い周波数のノイズへの対応 • 時間-周波数解析 • Waveletによる多重解像度解析 • Waveletによるノイズ除去 • 他の補強システムの利用 • 地磁気センサ 修士輪講会2006