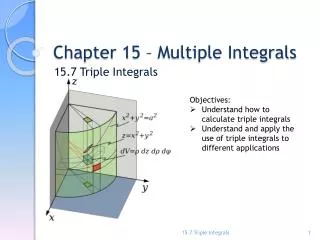
Multiple Integrals
Multiple Integrals. Part II. Triple Integral. If f ( x , y , z ) is a function of 3 variables and B = [ a , b ]×[ c , d ]×[ r , s ] is a box within the domain of f , then the triple integral of f over the box B is. if this limit exists.


Multiple Integrals
E N D
Presentation Transcript
Multiple Integrals Part II
Triple Integral If f(x,y,z) is a function of 3 variables and B = [a,b]×[c,d]×[r,s] is a box within the domain of f , then the triple integral of f over the box B is if this limit exists.
One Physical Interpretation of the Triple Integral If B is a solid box whose density is not uniform but can be described by a function ρ(x,y,z), then In particular, if the density is a constant k, then
2 1 0 x 1 -1 2 y -2 z-simple regions A bounded region E in 3D is said to be z-simple or of type I if it is bounded by the graphs of two continuous functions of x and y, i.e. E = {(x,y,z): (x,y) D, u1(x,y) ≤ z ≤ u2(x,y)} Example:
2 1 0 x 1 -1 2 y -2 z-simple regions In this case, Example:
z y x A solid that is not z-simple
x-simple regions A bounded region E in 3D is said to be x-simple or of type II if it is bounded by the graphs of two continuous functions of y and z, i.e. E = {(x,y,z): (y,z) D, u1(y,z) ≤ x ≤ u2(y,z)} y-simple regions A bounded region E in 3D is said to be y-simple or of type III if it is bounded by the graphs of two continuous functions of x and z, i.e. E = {(x,y,z): (x,z) D, u1(x,z) ≤ y ≤ u2(x,z)}
A region that is neither x-simple nor y-simple but may be z-simple A deformed torus
A region that is neither x-simple nor y-simple nor z-simple This is called a bumpy sphere.
8 4 0 -4 x y Find the total mass of the solid bounded by if the density function is ρ(x, y, z) = 6 – z
10 8 6 4 2 0 -1 y 0 1 -2 -1 0 x 1 2 Find the total mass of the solid bounded by if the density function is ρ(x, y, z) = y
Find the volume of the region bounded by the given surfaces. x y
Find the volume of the region bounded by the given surfaces. 0 y x
2 1 z 0 -1 -2 -2 -2 -1 -1 0 x 0 y 1 1 2 2 Examples Volume of a sphere with radius r
1 0.8 0.6 0.4 0.2 0 -0.4 -0.4 -0.2 -0.2 0 0 0.2 0.2 0.4 0.4 Examples Volume of an ice-cream cone with radius 0.5and angle
6 4 2 z 0 -2 -4 -4 -2 4 2 0 0 2 -2 4 y -4 x Find the volume of the solid bounded above by and below by
6 4 2 z 0 -2 -4 -4 -2 4 2 0 0 2 -2 4 y -4 x Find the volume of the solid bounded above by and below by
6 4 2 z 0 -2 -4 -4 -2 4 2 0 0 2 -2 4 y -4 x where can be found by solving for from the equation
z 1 0.5 0 -0.5 -1 -1 -1 -0.5 -0.5 0 x 0 0.5 y 0.5 1 1 Bumpy Sphere The general equation is of the form In this picture, m = 6 and n = 5. The volume can be computed by integration in spherical coordinates.
y R x Change of variables If we want to evaluate but the function f(x,y) is difficult to integrate, we can try to create a substitution u = g(x,y), v = h(x,y) If this works, we will be integrating an easier function w(u.v) but the domain of integration will be completely changed. v S u
Change of variables On the other hand, we may want to evaluate but the region R is difficult to work with, we can try to create a one-to-one transformation T(u,v) = (g(u,v), h(u,v)) and a rectangle S such that T(S) = R. If this works, we will be integrating the function f(g(u,v), h(u,v)) over the rectangle S ! y v T R S u x
The idea on the previous page is nice because we can now integrate over a rectangle, which is very easy indeed. However, when we use a transformation, dA = ΔxΔy will not be the same as ΔuΔv, hence we need to consider an additional factor which is introduced on the next page.
Jacobian Let T: 2→2 be a transformation given by x = g(u,v) and y = h(u,v), then the Jacobian of T is defined to be
Change of Variables • Suppose that T is a C1 transformation that maps a region S in the uv-plane onto a region R in the xy-plane. If • T is one-to-one on S (except possibly on the boundary), • fis continuous on R, • the Jacobian of T is nonzero on S and • R is either a x-simple or y-simple plane region, then
v y 2 2 1 1 u x 0 -1 1 0 -1 1 Example 1: Find the image of the square S = [0,1]×[0,1] under the transformation T given by x = u2 – v2y = 2uv Alsocompute the Jacobian for this transformation Click here to see animation
Example 2: Compute v 3 2 1 S 0 1 2 3 u where u = x + y and v = x - y
Remark In practice, we usually introduce u as a function of x, y and v also as a function of x, y, hence it will be easier to compute fortunately, we have the result that hence we only have to re-express the reciprocal in term of u and v.
Example 3: Compute v 5 4 s 3 2 1 0 1 2 3 4 u put u = xy and v = x2 – y2
1 -1 0 1 2 3 x 0 R -1 -2 -3 Example 4: Compute y = x - 1 v 5 4 ? 3 2 y = x - 2 1 0 1 2 3 4 u put u = x + y and v = x – y
Answer v 3 v = 2 v = 1 u 1 2 3 -3 -2 -1 0 -1