TEAM C
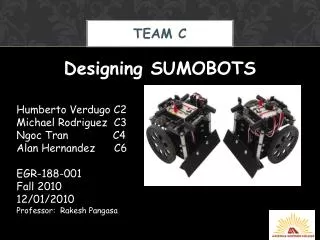
TEAM C. Designing SUMOBOTS. Humberto Verdugo C2 Michael Rodriguez C3 Ngoc Tran C4 Alan Hernandez C6 EGR-188-001 Fall 2010 12/01/2010 Professor: Rakesh Pangasa. Goals:. Design lightweight (less or equal than 1.3 lb) robot for SumoRobot competition.

TEAM C
E N D
Presentation Transcript
TEAM C Designing SUMOBOTS Humberto Verdugo C2 Michael Rodriguez C3 Ngoc Tran C4 Alan Hernandez C6 EGR-188-001 Fall 2010 12/01/2010 Professor: RakeshPangasa
Goals: • Design lightweight (less or equal than 1.3 lb) robot for SumoRobot competition. • Build a competitive sumobot meeting the criteria given • Obtain a decent place in the competition at the engineering celebrations EGR 188-001 Fall 2010
Process: A model for the body was proposed. Components were revised to check functionality. The raw materials were put together. A frame was built. The components were placed on top of the frame. The body was built and put on place. The chip was programed Program was tested. Sumobot was tested. EGR 188-001 Fall 2010
First Attempt: • - Electronic components: BasicX-24p micro controller, sonic range finder, push switch, infrared sensor, parallax servo motors and circuitry. • The circuit board and the components were put together. • Second Attempt: • - Frame was built • - Materials were reorganized on the frame avoiding any circuitry failures. EGR 188-001 Fall 2010
Initial Results Capability: The sumobot reacts when it crashes an object It turns to both sides Could not: The sumobot is not able to differentiate the color (black & white) of the surface it is standing on. EGR 188-001 Fall 2010
Core Components EGR 188-001 Fall 2010
Summary & Conclusions • As the sumobot initiates • - There will be a 5 seconds delay before sumobot initiates functions. • -After the 5 seconds delay, the sumobot will turn around in search of opponents to take them out of the safe area. • -If one whisker is activated, the sumobot will turn in the same direction of the activated whisker. EGR 188-001 Fall 2010
Any questions? by the way our strategy wont be given EGR 188-001 Fall 2010