Vertical Navigation Constraints
Vertical Navigation Constraints.

Vertical Navigation Constraints
E N D
Presentation Transcript
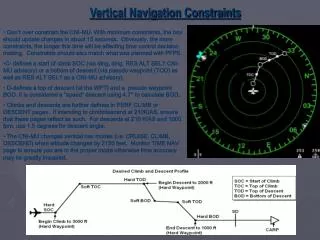
Vertical Navigation Constraints • Don’t over constrain the CNI-MU. With minimum constraints, the box should update changes in about 15 seconds. Obviously, the more constraints, the longer this time will be affecting time control decision making. Constraints should also match what was planned with PFPS. • C- defines a start of climb SOC (via ding, ding, RES ALT SEL? CNI-MU advisory) or a bottom of descent (via pseudo waypoint (TOD) as well as RES ALT SEL? as a CNI-MU advisory). • D-defines a top of descent (at the WPT) and a pseudo waypoint BOD. It is considered a “speed” descent using 4.7° to calculate BOD. • Climbs and descents are further defines in PERF CLIMB or DESCENT pages. If intending to climb/descend at 210KIAS, ensure that these pages reflect as such. For descents at 210 KIAS and 1000 fpm, use 1.5 degrees for descent angle. • The CNI-MU changes vertical nav modes (i.e. CRUISE, CLIMB, DESCEND) when altitude changes by 2150 feet. Monitor TIME NAV page to ensure you are in the proper mode otherwise time accuracy may be greatly impaired.
“CHECK SPEED CONSTRAINT” TRBJ1 S20C BENIT “CHECK SPEED CONSTRAINT” TOC TOD TOD TOC BJDZ TOD IP086 S20D “CHECK SPEED CONSTRAINT” TYVNB RESET ALT SEL?” TRBJ2 W8DME SKE EXAMPLE (BJ 20 LEGS PAGES) • LRF - no constraints; set up PERF CRUISE to 3000 feet and 180 KIAS for initial climb to W8DME; cruise winds will not effect time control from initial takeoff until in cruise mode. • W8DME – / 6000C • BENIT – 210 / 6000C (needs C to tie Speed) • S20B – • S20C - • S20D - / 3500C • S20G- • IP086- / 2000C • BJDZ- constraints come from CARP; NOTE: Speed, Altitude and Winds (from “double pumping” altitude winds) will remain in PERF CRUISE unless overridden via another constraint. • ESC - 180 / 3000 C • TRBJ1 • TRBJ2- / 2000C • TYVNB 135 / Note: Crews should avoid entering TOD and BOD vertical commands at adjacent waypoints unless a cruise segment is ensured to occur between the two descents. When flying TOD and BOD vertical commands at adjacent waypoints, crews should monitor the NAV flight plan display to ensure TOD and BOD waypoints do not cross. S20B RESET ALT SEL?” RESET ALT SEL?” RESET ALT SEL?” LRF – Set PRF CRUISE to 180 knots and 3000 feet or as cleared.
Set up the W8DME and departure the same as SKE (PERF CRUISE 180 and 3000). Then constrain only BEGEE with 210 knots. The other option to get a more accurate take off time is to use the average speed and altitude for which the route will be flown. The only other constraint generally needed for visual routes is on the escape point. Without this, the box still thinks that you will be flying drop altitude and airspeed with drop winds. Once entered in the visual low level environment, keeping the PERF CRUISE page tight (with current altitude and airspeed) will make time control easier and more precise. For pacing purposes, accomplish this after each turn point. Visual Routes