Download
1 / 24
310 likes | 756 Views
Modélisation Bond Graph 4- Mécanique. 4.1 Systèmes plans. 4.2 Dynamique du solide – Multi-Bond graph. PAG + FM. 4.1 Systèmes plans. Pendule de longueur variable r x,y positions du centre de masse m. En introduisant les vitesses :. Utiles au PFD.

E N D
Modélisation Bond Graph 4- Mécanique 4.1 Systèmes plans 4.2 Dynamique du solide – Multi-Bond graph PAG + FM
4.1 Systèmes plans Pendule de longueur variable r x,y positions du centre de masse m En introduisant les vitesses : Utiles au PFD Le BG contiendra donc les trois jonctions suivantes Permet de calculer l’élongation et donc l’effort dans le ressort 1 : Vx I : m Se : mg 1 : Vy I : m 1 : Vr C : 1/K ! Les vitesses Vx, Vy et Vr sont liées entre elles
Fx ∫ x 1:vx MTF : mx Fr Fr 0:Fr 1:vr vr Fy ∫ y 1:vy MTF : my Fr Construction de la vitesse vr par une jonction 0 et transformateurs modulés ( mx, my) x et y sont nécessaires au calcul de mx et my
BG global : I : m Fx ∫ x 1:vx MTF : mx Fr Fr 0:Fr C : 1/K vr Fy ∫ y 1:vy MTF : my Fr Se : mg I : m
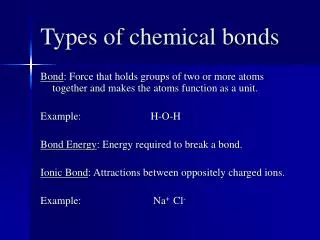
Suspension 2D Déplacements notés Y, θ, x1 et x2. Vitesses : vx1 , vx2 , vy , ω Déplacement du centre de masse uniquement selon Y Hypothèse des petits angles Relations géométriques : Le BG contiendra donc les jonctions suivantes 1 : ω I : J R:b1 1 : Vx1 C : 1/K1 1 : Vx2 R:b2 C : 1/K2 1 : Vy Se : Mg I:M
Première traduction possible des relations géométriques Transformateur multi-lien : 1 : Vx1 1 : Vy TF : mij 1 : ω 1 : Vx2 Les flux VY et ω sont imposés Les flux Vx1 et Vx2 sont calculés
C:1/K1 I : M 1 : Vx1 R:b1 Se:Mg 1 : Vy TF : mij I : J 1 : ω R:b2 1 : Vx2 C:1/K2
C:1/K2 I : M 0 : Fx2 1 : Vx2 R:b2 Se:Mg 1 : Vy R:b1 TF : b 0 : Fx1 1 : Vx1 TF : 1/a 1 : ω I : J Quatre éléments sont en causalité intégrale C:1/K1
seconde traduction possible des relations géométriques C:1/K2 I : M 1 : Vy 0 : Fx1 TF : m2 1 : Vx2 R:b2 Se:Mg TF : n2 TF : m1 R:b1 1 : Vx1 0 : Fx2 TF : n1 1 : ω I : J C:1/K1 Deux solutions possibles de causalité intégrale
Toutes deux mènent à une boucle de causalité (orientation dans le même sens sur tous les liens) : implique qu’une variable dépend d’elle-même Difficultés de résolution Pour « casser » cette boucle impose causalité dérivée sur l’élément I:J Aucune boucle de causalité mais I;J est en causalité dérivée : il existe donc une relation algébrique entre les vitesses comme pour la boucle de causalité Première méthode meilleure (pas de boucle de causalité) Plusieurs BG peuvent représenter le même système physique. Règle : on impose les vitesses qui dépendent des éléments intertiels et on en déduit les vitesses génératrices dans les éléments R et C Pour des systèmes plus complexes, cette règle est plus délicate à appliquer, il faut «essayer»plusieurs BG.
Elément I multiporte Énergie stockée fonction de n variables de moment généralisé p°2 f2 p°1 p°n I fn f1 Illustration : suspension 2D Fx1=p°1 Fx2=p°2 I Vx2=f2 Vx1=f1
Elément C multiporte Énergie stockée fonction de n variables de déplacement e2 q°2 e1 en C q°n q°1 Illustration : Condensateur à armature mobile F u F C x°=v q°=i x Énergie stockée fonction de deux variables de déplacement q,x Armature fixe avec
ELEMENTS DE MULTI-BOND GRAPH Eléments multi-porte de stockage e e e C R f f f Gyrateur multi-porte n liens e1 e2 GY : Gij f1 f2 m liens
Transformateur multi-porte n liens e1 Tij e2 f1 f2 m liens nx1 mx1 e11 e21 mxn 1 TF : t11 1 f21 f11 TF : tn1 TF : tn1 e1m e2n 1 1 TF : mn f1m f2n Les coefficients de la matrice T peuvent être modulés par une ou plusieurs variables
Jonctions m(1) 0 n n nxm TABLEAU de jonction 0 0 n fois m(n) 0 Elément multi-porte 0 1 m 0 0 m
4.2 DYNAMIQUE DU SOLIDE But :étude du mouvement d’un solide dans l’espace Repère des axes principaux d’inertie Repère attaché au corps solide indéformable. Il passe par le centre de gravité G du solide. Dans ce repère, les produits d’inertie sont nuls. La matrice d’inertie est diagonale positive. Equations d’Euler V: vitesse du centre de gravité par rapport à un repère fixe et exprimée dans le repère des axes principaux d’inertie. ω: vitesse de rotation du centre de gravité par rapport à un repère fixe et exprimée dans le repère des axes principaux d’inertie.
F: force appliquée au solide exprimée dans repère des axes principaux d’inertie. Γ: couple appliqué au solide exprimé dans repère des axes principaux d’inertie. Equations d’Euler ( dans ce repère) Modélisation par BG Les liens matérialisent les efforts et le flux vecteurs de dimension 3. De même un signal vectoriel (ici, de dimension 3) est représenté par un double trait terminé par une flèche pleine.
EJS-F 1:VG EJS-C 1:ω I:M I:J 0:F 0:C I:M désigne la matrice masse diagonale, chaque terme diagonal vaut m. EJS-C signifie EulerianJunctionStructure pour les couples, et EJS-F EulerianJunctionStructure pour les forces. La «bulle» EJS-C du BG, calcule les termes non linéaires de l’équation d’Euler. EJF-F calcule les termes de l’équation d’Euler (Forces) contenant les produits de vitesse de rotation par vitesse de translation. Il faut donc fournir le vecteur signal ω matérialisé par la flèche pleine.
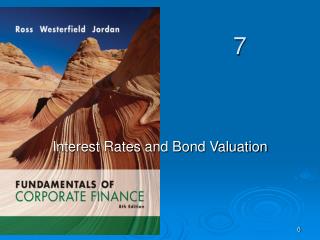
I:Jx Jz K Se:Гx 1:ωx MGY MGY K Jx Se:Гy 1:ωy MGY 1:ωz Se:Гz K Jy I:Jy I:Jz La jonction EJS-C est représentée en BG mono-lien
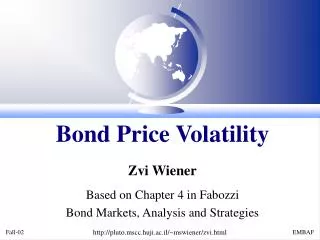
La jonction EJS-C est représentée en BG mono-lien I:Mx ωy ωz Mz K K My Se:Fx 1:Vx MGY MGY Se:Fy 1:Vy MGY 1:Vz Se:Fz Mx K I:My I:Mz ωx Des forces fixes comme la gravité ne peuvent pas être appliquées directement sur ces BG car dans ces BG les vecteurs (force, vitesse, couple)sont exprimés dans le repère des axes principaux d’inertie et pas la gravité.
CHANGEMENT DE REPERE Généralités Notons rkV un vecteur colonne V exprimé dans le repère Rk Passage du repère de départ 1 au repère d’arrivée 2. Notons A12 la matrice associée au changement de base: r1v = A12.r2V Connaissant le vecteur r2V calculé dans la base d’arrivée (2) cette relation calcule les coordonnées r1V du même vecteur exprimées dans la base de départ (1). A12 commence donc par l’indice de la base de départ A12 est formée des cosinus directeurs des vecteurs de base du repère 2 exprimés par rapport au repère 1.
Exemple : Considérons la rotation autour de l’axe z et d’angle ψ> 0 qui transforme le repère de départ 1 en repère 2. y2 y1 x2 ψ x1 La matrice de passage A1 possède en première colonne les cosinus directeurs du vecteur i2 de la base 2 dans la base 1. La deuxième colonne est formée à partir des cosinus directeurs du vecteurj2. Notation : s =sinus et c =cosinus
Modélisation BG : Changement de base par rotation se représente en BG par un transformateur modulé alimenté par un signal ayant pour composantes les termes de A12. Noter la causalité Ce signal « transporte » donc une matrice à 9 composantes. Signal = matrice r1v = A12.r2V 1: r2V MTF:A12 1: r1V r1V=A12.r2V Remarque :il y a conservation de puissance, car : r2F=A12T.r1F r2FT . r2V = r1FT . A12 . r2V = r1FT . r1V
SOLIDE INDEFORMABLE en Mouvement Représentation d’un solide par BG, on effectue trois étapes: •Représenter les vitesses (étude cinématique). •Connecter les vitesses par des liens, des jonctions et des MTF exprimer les relations entre les vitesses absolues de deux points d’un même solide (indéformable) représenter la cinématique du solide •Étudier la dynamique en incluant les sources d’effort (inerties et forces extérieures) introduction des équations d’Euler.