Programmable Self-Assembly
This work explores programmable self-assembly through biologically-inspired multiagent control. Presented at the AAMAS 2002 conference, it emphasizes a novel design approach for self-organizing systems, using an abstract geometry-based language to specify desired global shapes. The method integrates principles from origami mathematics and developmental biology, demonstrating how local interactions can lead to emergent global behaviors. The study indicates the robustness and adaptability of the proposed model, despite challenges like resource constraints and synchronization issues.

Programmable Self-Assembly
E N D
Presentation Transcript
Programmable Self-Assembly “Programmable Self-Assembly Using Biologically-Inspired Multiagent Control”, R. Nagpal, ACM Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS), Bologna, Italy, July 2002. And “Programmable Self-Assembly: Constructing Global Shape Using Biologically-Inspired Local Interactions and Origami Mathematics”, Radhika Nagpal, PhD Thesis, MIT Artificial Intelligence Laboratory Technical Memo 2001-008, June 2001. Prashanth Bungale October 26, 2004
Significantly different approach to the design of self-organizing systems: the desired global shape is specified using an abstract geometry-based language, and the agent program is directly compiled from the global specification. Programmable Self-Assembly: Global Shape Formation
Overview Epithelial Cell Morphogenesis And Drosophila Cell Differentiation Geometry and Origami Mathematics Achieving a Global Action using Local Behavior and Interactions Generative Program Instructing in terms of Global Actions Robust, Programmable Shape Formation
Lessons from Developmental Biology • Complex structures from cells with identical DNA • Emergent global consequences from strictly local interactions Lessons from Origami Mathematics and Geometry • Generative program for scale-independent shape formation using geometry-based language • Simple, yet expressive enough to generate wide variety of shapes and patterns
Cell computation model • Autonomous • Identical program • Local communication • Local sensing, actuation • Limited resources, no global identifiers • No global coordinates • No global clock
Biologically Inspired Primitives • Gradients: • Neighborhood Query: • Polarity Inversion: • Cell-to-cell Contact: • Flexible Folding: fold apical or basal surface
Robustness • Cell programs are robust • Axioms produce reasonably straight and accurate lines • Scale Independence • Without relying on: • regular grids, • global coordinates, • unique global identifiers, or • synchronous operation • Robustness achieved by: • Large and dense populations (expected neighbors > 15), depending on average behavior, no centralized control
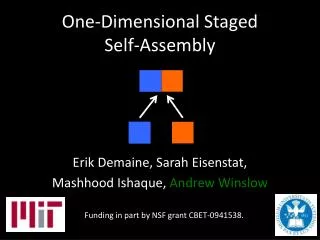
Accuracy decreases as: Length of crease Distance between sources increases Spatial Variance of Error Interference between gradients from two sources. The concentric bands represent the radially-symmetric uncertainty in distance estimates from a gradient from a sincgle source. The composition of two gradients causes the error to vary spatially.
Analysis of Resource Consumption • Resource consumption • Cell code conservation
Limitations • No compilation has been specified for axioms A5 and A6. • Not completely free of centralized control or global coordinates • p1, l1, etc. • Not entirely identical cell programs • A combination of pre-programmed internal state and case-based programming (“if c1 (…)”, “if c3 (…)”, etc.) can always make up for specialized programs. • Not completely Asynchronous • Global Barrier Synchronization during each fold / crease completion • Calibrated estimate used during distributed crease formation • Failure of shape formation sometimes possible due to: • Failure of entire groups of cells forming points or lines, and large regional failures or holes • Failure of barrier synchronization across axioms • Gradient (and thus, region) leakage (caused due to discontinuity of cells) • Absence of cells at intersections (caused due to insufficiently dense cells and wide creases) • Large spatial variance of error • Malicious Cells