Download
1 / 1
10 likes | 151 Views
Solution. Performance Evaluation. Motivation. We have implemented VSR in TinyOS and evaluated preliminary results using Tmotes Invent with a 2-axis accelerometer. We ran a small experiment carrying 5 sensors along a 40 m long hallway where the caller is placed in the middle of the hallway.

E N D
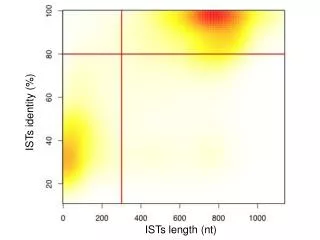
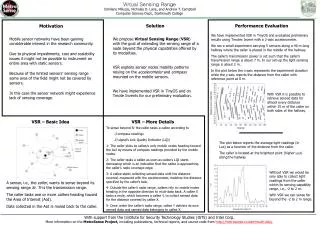
Solution Performance Evaluation Motivation We have implemented VSR in TinyOS and evaluated preliminary results using Tmotes Invent with a 2-axis accelerometer. We ran a small experiment carrying 5 sensors along a 40 m long hallway where the caller is placed in the middle of the hallway. The caller’s transmission power is set such that the caller’s transmission range is about 7 m. In our set-up the light sensing range is about 2 m. In the plot below the x-axis represents the experiment duration while the y-axis reports the distance from the caller with reference point at 0 m. Mobile sensor networks have been gaining considerable interest in the research community. Due to physical impediments, cost and scalability issues it might not be possible to instrument an entire area with static sensors. Because of the limited sensors’ sensing range some area of the field might not be covered by sensors. In this case the sensor network might experience lack of sensing coverage. We propose Virtual Sensing Range (VSR) with the goal of extending the sensing range of a node beyond the physical capabilities offered by its modalities. VSR exploits sensor nodes mobility patterns relying on the accelerometer and compass mounted on the mobile sensors. We have implemented VSR in TinyOS and on Tmote Invents for our preliminary evaluation. Virtual Sensing Range Emiliano Miluzzo, Nicholas D. Lane, and Andrew T. Campbell Computer Science Dept., Dartmouth College With VSR it is possible to retrieve sensed data for almost every distance within 15 m of the caller on both sides of the hallway. VSR – Basic Idea VSR – More Details To sense beyond Sr the caller tasks a callee according to i) compass readings ii) signal’s Link Quality Indicator (LQI) 1- The caller picks as callee/s only mobile nodes heading toward the AoI by means of compass readings provided by the mobile nodes. 2- The caller tasks a callee as soon as callee’s LQI starts decreasing which is an indication that the callee is approaching the caller’s radio coverage edge. 3- A callee starts collecting sensed data until the distance covered, measured with the accelerometer, matches the distance specified by the caller’s task. 4- Outside the caller’s radio range, callees rely on mobile nodes heading in the opposite direction to mule data back. A callee X tasks a mule, which becomes a callee Y, to collect sensed data for the distance covered by callee X. 5- Once under the caller’s radio range, callee Y delivers its own sensed data and sensed data belonging to callee X. The plot below reports the average light readings (in Lux) as a function of the distance from the caller. The caller is located at the brightest point (higher Lux) along the hallway. Without VSR we would be only able to collect light readings from the caller within its sensing capability range, i.e., -2 to 2 m. With VSR we can sense far beyond the -2 to 2 m range. A sensor, i.e., the caller, wants to sense beyond its sensing range Sr. Tr is the transmission range. The caller tasks one or more callees heading toward the Area of Interest (AoI). Data collected in the AoI is muled back to the caller. With support from the Institute for Security Technology Studies (ISTS) and Intel Corp. More information on the MetroSense Project, including publications, technical reports, and source code from http://metrosense.cs.dartmouth.edu/.