Download
1 / 1

E N D
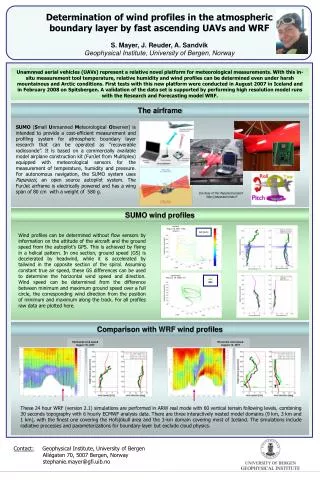
Unamnned aerial vehicles (UAVs) represent a relative novel platform for meteorological measurements. With this in-situ measurement tool temperature, relative humidity and wind profiles can be determined even under harsh mountainous and Arctic conditions. First tests with this new platform were conducted in August 2007 in Iceland and in February 2008 on Spitsbergen. A validation of the data set is supported by performing high resolution model runs with the Research and Forecasting model WRF. Determination of wind profiles in the atmospheric boundary layer by fast ascending UAVs and WRFS. Mayer, J. Reuder, A. SandvikGeophysical Institute, University of Bergen, Norway The airframe SUMO (Small Unmanned Meteorological Observer) is intended to provide a cost-efficient measurement and profiling system for atmospheric boundary layer research that can be operated as “recoverable radiosonde”. It is based on a commercially available model airplane construction kit (FunJet from Mulitiplex) equipped with meteorological sensors for the measurement of temperature, humidity and pressure. For autonomous navigation, the SUMO system uses Paparazzi, an open source autopilot system. The FunJet airframe is electrically powered and has a wing span of 80 cm with a weight of 580 g. Courtesy of the Paparazzi project. http://paparazzi.enac.fr SUMO wind profiles Iceland, August 18, 2007 17:56 descent GS [m/s] Wind profiles can be determined without flow sensors by information on the attitude of the aircraft and the ground speed from the autopilot’s GPS. This is achieved by flying in a helical pattern. In one section, ground speed (GS) is decelerated by headwind, while it is accelerated by tailwind in the opposite section of the spiral. Assuming constant true air speed, these GS differences can be used to determine the horizontal wind speed and direction. Wind speed can be determined from the difference between minimum and maximum ground speed over a full circle, the corresponding wind direction from the position of minimum and maximum along the track. For all profiles raw data are plotted here. Spitsbergen, February 28, 2008 15:11 asc des Comparison with WRF wind profiles Horizontal wind speed August 18, 2007 Horizontal wind speed August 13, 2007 These 24 hour WRF (version 2.1) simulations are performed in ARW real mode with 60 vertical terrain following levels, combining 30 seconds topography with 6 hourly ECMWF analysis data. There are three interactively nested model domains (9 km, 3 km and 1 km), with the finest one covering the Hofsjökull area and the 3-km domain covering most of Iceland. The simulations include radiative processes and parameterizations for boundary-layer but exclude cloud physics. Contact: Geophysical Institute, University of Bergen Allégaten 70, 5007 Bergen, Norway stephanie.mayer@gfi.uib.no