Download
1 / 23
230 likes | 306 Views
Explore the fundamentals of automatic control, including PID techniques, proportional and integral actions, terminology, and practical applications across various industries.

E N D
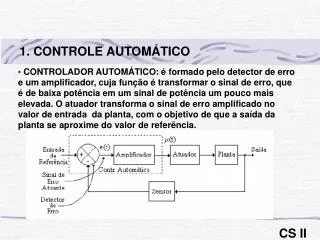
1. CONTROLE AUTOMÁTICO CONTROLADOR AUTOMÁTICO: é formado pelo detector de erro e um amplificador, cuja função é transformar o sinal de erro, que é de baixa potência em um sinal de potência um pouco mais elevada. O atuador transforma o sinal de erro amplificado no valor de entrada da planta, com o objetivo de que a saída da planta se aproxime do valor de referência. CS II
2. IMPLEMENTAÇÃO DE CONTROLADORES AÇÃO DE CONTROLE: é a maneira pela qual o controlador automático produz o sinal de controle. CONTROLADORES: utilizam uma fonte de potência e a operação é feita com um tipo de potência. CONTROLADOR ELETRÔNICO: utiliza como fonte de energia a eletricidade. CONTROLADOR PNEUMÁTICO: utiliza como fonte de energia a pressão do ar. CONTROLADOR HIDRÁULICO: utiliza como fonte de energia a pressão do óleo. CS II
3. TERMINOLOGIA ASSOCIADA PV = Process Variable (variável de processo). Variável que é controlada (ex.: pressão, temperatura, umidade, etc). SV ou SP = Setpoint. Valor desejado para a variável de processo. MV = Variável Manipulada. Variável sobre a qual o controlador atua para controlar o processo (ex.: posição de uma válvula, tensão aplicada a uma resistência de aquecimento, etc). Erro ou Desvio = (SV - PV), para ação reversa, e (PV - SV), para ação direta. Ação de Controle = Reversa ou Direta. Atuação aplicada a MV na ocorrência de variações da PV. Ação Reversa = Se PV aumenta, MV diminui. Exemplo de aplicação: controle de aquecimento. Ação Direta = Se PV aumenta, MV aumenta. Exemplo de aplicação: controle de refrigeração. CS II
4. TÉCNICA DE CONTROLE ON - OFF CONCEITO: o atuador tem somente duas posições fixas (Ligado / Desligado). A principal vantagem é sua simplicidade e sua desvantagem é a falta de precisão e linearidade. APLICAÇÃO PRÁTICA: muito comum em equipamentos de refrigeração e em sistemas de aquecimento com resistência. HISTERESE: pequena diferença entre os valores positivos e negativos de erro. Isto cria um intervalo diferencial que diminui a freqüência de abertura e fechamento do controlador. CS II
5. TÉCNICA DE CONTROLE PID CONCEITO: consiste em calcular um valor de atuação sobre o processo a partir das informações do valor desejado e do valor atual da variável do processo. Esse valor de atuação sobre o processo é transformado em um sinal adequado ao atuador utilizado (válvula, motor, relé), e deve garantir um controle estável e preciso. P = PROPORCIONAL = correção proporcional ao erro. I = INTEGRAL = correção proporcional ao produto erro x tempo. D = DERIVATIVA = correção proporcional à taxa de variação do erro. CS II
6.1. AÇÃO DE CONTROLE PROPORCIONAL CONCEITO: a correção a ser aplicada ao processo deve crescer na proporção que cresce o erro entre o valor real e o desejado. Equacionamento: u(t) = Kpr x e(t) ou Kpr = U(s) / E(s) onde: Kpr = Ganho Proporcional Função de transferência do controlador: Gc(s) = Kpr (O controlador é um amplificador de ganho constante). CS II
6.2. AÇÃO DE CONTROLE PROPORCIONAL No Controle Proporcional o valor de MV é proporcional ao valor do desvio (em desvio zero SP = PV e, assim, MV = 0). À medida que o desvio cresce, MV aumenta até o máximo valor de 100%. BANDA PROPORCIONAL: o valor de desvio que provoca MV = 100% define a BP. BP alta: saída MV só irá assumir um valor alto para corrigir o processo de o desvio for alto. BP baixa: a saída MV assume valores altos de correção para o processo mesmo para pequenos desvios. Resumindo: quanto menor o valor da BP, mais forte é a ação proporcional de controle. SINTONIA: processo de ajuste que envolve a definição da banda proporcional. CS II
6.3. AÇÃO DE CONTROLE PROPORCIONAL SISTEMA COM CONTROLE PROPORCIONAL E REALIMENTAÇÃO UNITÁRIA: Gc(s) = Kpr FTMF = T(s) = Kpr.Gp(s) / [1 + (Kpr.Gp(s)] O controlador não introduz quaisquer pólos ou zeros ao sistema; somente determina a localização dos pólos em malha fechada. IMPLEMENTAÇÃO ELETRÔNICA: eo(t)/ei(t) = Rf / R1 onde: Kpr = Rf/R1 CS II
7.1. AÇÃO PROPORCIONAL + INTEGRAL AÇÃO INTEGRAL: consiste em uma resposta na saída do controlador que é proporcional à amplitude e duração do desvio. Erros pequenos, mas que existem há muito tempo, requerem correção mais intensa. AÇÃO P + I: a ação Integral não é utilizada isoladamente. Sempre vem em conjunto com a ação proporcional. A ação integral tem o efeito de eliminar o desvio característico de um controle proporcional. CS II
7.2. AÇÃO PROPORCIONAL + INTEGRAL EQUACIONAMENTO: u(t) = Kpr.e(t) + Ki.e(t)dt onde: Ki = ganho integral U(s) = Kpr. E(s) + Ki.E(s)/s FUNÇÃO DE TRANSFERÊNCIA DO CONTROLADOR: Gc(s) = U(s)/E(s) = Kpr + Ki/s = (Kprs + Ki) / s ou ainda Gc(s) = [Kpr.(s + Ki/Kpr)] / s onde: Ki / Kpr = 1 / Ti Ti = (Kpr / Ki) = constante de tempo integral CS II
7.3. AÇÃO PROPORCIONAL + INTEGRAL ANÁLISE DA FUNÇÃO DE TRANSFERÊNCIA DO CONTROLADOR: Gc(s) = [Kpr.(s + Ki/Kpr)] / s 1) O controlador PI, por acrescentar 1 pólo na origem, aumenta o tipo do sistema, melhorando o erro de regime permanente (para uma entrada degrau, inexiste erp). 2) FTRD = G(s) = Kpr.[s + (1 / Ti)]. Gp(s) / s = Kpr [s + zi]. Gp(s) / s são inseridos 1 pólo e 1 zero a diferença entre no. de pólos e no. de zeros não se altera ângulo das assíntotas do Root Locus não muda, MAS: o ponto de intersecção das assíntotas com o eixo real (centróide) aproxima-se da origem, diminuindo a estabilidade relativa. Ki determina a posição do zero introduzido Kpr determina as posições dos pólos em malha fechada CS II
7.4. AÇÃO PROPORCIONAL + INTEGRAL ERRO EM REGIME PERMANENTE: a ação Integral tem o objetivo de eliminar o erro em regime permanente. A adoção de um termo integral excessivo pode levar o processo à instabilidade. A adoção de um termo integral pequeno retarda em demasia a estabilização. CS II
7.5. AÇÃO PROPORCIONAL + INTEGRAL IMPLEMENTAÇÃO ELETRÔNICA: Gc(s) = Kpr . [1 + (1 / Tis)] Ex(s) / Ei(s) = 1 + [(1/Cs) / R] Ex(s) / Ei(s) = 1 + [1 / (RCs)] Eo(s) / Ex(s) = 1 + (Rf / R1) onde: Kpr = ganho proporcional = 1 + (Rf / R1) Ti = constante de tempo integral = RC CS II
8.1. AÇÃO PROPORCIONAL + DERIVATIVA AÇÃO DERIVATIVA: consiste em uma resposta na saída do controlador que é proporcional à taxa de variação do desvio. Se o erro está variando muito rápido, esta taxa de variação deve ser reduzida para evitar oscilações. AÇÃO P + D: a ação Derivativa não é utilizada isoladamente. Sempre vem em conjunto com a ação proporcional. A ação derivativa tem o efeito de reduzir a velocidade das variações de PV, evitando que se eleve ou reduza muito rapidamente. CS II
8.2. AÇÃO PROPORCIONAL + DERIVATIVA EQUACIONAMENTO: u(t) = Kpr.e(t) + Kd. (d e(t) / dt) onde: Kd = ganho derivativo U(s) = Kpr. E(s) + Kds.E(s) FUNÇÃO DE TRANSFERÊNCIA DO CONTROLADOR: Gc(s) = U(s)/E(s) = Kpr + Kds = Kd [s + (Kpr/Kd)] = Kd [s + (1 / Td)] ou ainda: Gc(s) = Kpr [1 + (Kd / Kpr)s] = Kpr [1 + Tds] onde: 1 / Td = (Kpr / Kd) Td = (Kd / Kpr) = constante de tempo derivativa CS II
8.3. AÇÃO PROPORCIONAL + DERIVATIVA ANÁLISE DA FUNÇÃO DE TRANSFERÊNCIA DO CONTROLADOR: Gc(s) = Kd [s + (Kpr/Kd)] 1) O controlador PD é muito bom nos transitórios, pois aumenta a velocidade de correção ao erro na resposta de um sistema. Se a planta é um sistema tipo 1 ou maior, a ação derivativa cancela 1 “s” no denominador, reduzindo a ordem de 1. 2) FTRD = G(s) = (Kpr + Kds) . Gp(s) = Kd [s + zd]. Gp(s) é inserido 1 zero a ação derivativa pura, leva a saída do controlador tornar-se grande tão logo o sinal de erro apareça associado a ação proporcional, gera uma ação corretiva antes que um sinal de erro realmente ocorra. CS II
8.4. AÇÃO PROPORCIONAL + DERIVATIVA CAPACIDADE DE ANTECIPAÇÃO OU PREDITIVA: ao antecipar a alteração da variável do processo, a ação derivativa reduz ou elimina o Overshoot e as oscilações no período transitório. CS II
8.5. AÇÃO PROPORCIONAL + DERIVATIVA IMPLEMENTAÇÃO ELETRÔNICA: Gc(s) = Kpr . [1 + Tds] Ex(s) / Ei(s) = 1 + [R / (1/Cs)] Ex(s) / Ei(s) = 1 + (RCs) Eo(s) / Ex(s) = 1 + (Rf / R1) onde: Kpr = ganho proporcional = 1 + (Rf / R1) Td = constante de tempo derivativa = RC CS II
9.1. AÇÃO DE CONTROLE PID AÇÃO P + I + D: objetiva combinar as vantagens das 3 ações de controle. É utilizado para melhorar tanto a resposta transitória, como a resposta de regime permanente. Mas, cria-se a dificuldade de ajustar a intensidade de cada um dos termos, processo chamado de sintonia do PID. CS II
9.2. AÇÃO DE CONTROLE PID EQUACIONAMENTO: u(t) = Kpr.e(t) + Ki.e(t)dt + Kd.(d e(t) / dt) U(s) = Kpr. E(s) + (Ki / s).E(s) + Kds.E(s) FUNÇÃO DE TRANSFERÊNCIA DO CONTROLADOR: Gc(s) = U(s)/E(s) = Kpr + (Ki/s) + Kds Gc(s) = Kpr [1 + (Ki / (Kprs)) + (Kds / Kpr)] = Kpr [1 + (1 / (Tis)) + Tds] onde: Ti = (Kpr / Ki) = constante de tempo integral Td = (Kd / Kpr) = constante de tempo derivativa CS II
9.3. AÇÃO DE CONTROLE PID ANÁLISE DA FUNÇÃO DE TRANSFERÊNCIA DO CONTROLADOR: Gc(s) = Kpr [1 + (1 / (Tis)) + Tds] 1) FTRD = Gc(s) . Gp(s) = Kpr [1 + (1 / (Tis)) + Tds] . Gp(s) = [Kpr. (Ti.Td.s2 + Tis + 1) / (Tis) ] . Gp(s) 2) O controlador PID aumenta em 2 o no. de zeros e em 1 o no. de pólos o fator (1/s) aumenta o tipo de 1. CS II
9.4. AÇÃO DE CONTROLE PID FUNÇÃO DE TRANSFERÊNCIA COM A AÇÃO DIFERENCIAL FISICAMENTE REALIZÁVEL: Gc(s) = Kpr + (Ki / s) + [Kds / (1 + Tds)] Gc(s) = K.(s + z1).(s + z2) / [s.(s + p)] 1) Neste caso a função de transferência da parte derivativa do controlador é realizável fisicamente, pois np = nz (no. de pólos = no. de zeros). 2) Os zeros do numerador (z1 e z2) podem ser um par complexo conjugado (não é obrigatório que sejam !). 3) Uma interessante alternativa de projeto é a colocação da ação derivativa na malha de realimentação, mantendo o restante no ramo direto. CS II