Download

1 / 7
70 likes | 179 Views
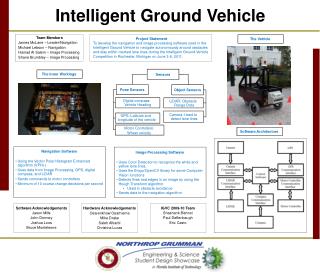
This project focuses on designing control software for an autonomous vehicle that navigates a complex obstacle course. Using LIDAR, GPS, a digital compass, and camera systems, the vehicle must move from waypoint to waypoint, stay within lane lines, and avoid obstacles. Despite experiencing hardware failures, critical software bugs have been addressed, improving navigation efficiency. The project aims to integrate advanced image processing techniques for line detection to enhance the vehicle's performance. Current progress and future milestones will be documented on our project website.

E N D
Intelligent Ground Vehicle Competition Navigation Michael Lebson - mlebson@my.fit.edu James McLane - jmclane@my.fit.edu Image Processing Hamad Al Salem - halsalem@my.fit.edu Shane Brumbley - sbrumble@my.fit.edu Faculty Sponsor Dr. EraldoRibeiro - eribeiro@fit.edu Project Website http://my.fit.edu/~mlebson/seniorDesign
Introduction • Designing Control Software for autonomous obstacle course navigating vehicle. • Must navigate from waypoint to waypoint • Must use LIDAR, GPS, Digital Compass, and Camera to determine movement around the course • Must stay within lane lines and avoid obstacles in the completion lane
Overall Progress • Hardware • Not so good… hardware failures • Probably not ready for competition • Software Testing • Can’t test with a broken robot • Simulation alternative, difficult to simulate amount of data. • Will attempt anyway.
Navigation Progress • Critical bugs squashed • Unit conversion • cm/s != mm/s • m/s != mm/s • When turning right, keep turning right? • “Random” equation coefficients shouldn’t be random. • Think function vastly more efficient • ~5 unnecessary loops eliminated
Image Processing Progress • For line detecting, the camera works and detects every line. • Much faster than before. • Future • Integrate the VideoForm code to the main interface. • Minimizing the lines for white and yellow colors.