Intelligent Ground Vehicle Competition
80 likes | 231 Views
Intelligent Ground Vehicle Competition. Navigation Michael Lebson - mlebson@my.fit.edu James McLane - jmclane@my.fit.edu Image Processing Hamad Al Salem - halsalem@my.fit.edu Shane Brumbley - sbrumble@my.fit.edu Faculty Sponsor Dr. Eraldo Ribeiro - eribeiro@fit.edu Project Website

Intelligent Ground Vehicle Competition
E N D
Presentation Transcript
Intelligent Ground Vehicle Competition Navigation Michael Lebson - mlebson@my.fit.edu James McLane - jmclane@my.fit.edu Image Processing Hamad Al Salem - halsalem@my.fit.edu Shane Brumbley - sbrumble@my.fit.edu Faculty Sponsor Dr. Eraldo Ribeiro - eribeiro@fit.edu Project Website http://my.fit.edu/~mlebson/seniorDesign
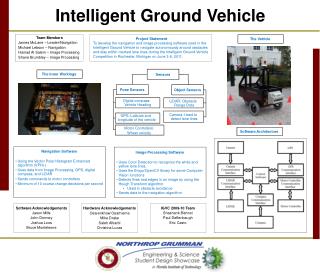
The Robot • Light Detection and Ranging system (LiDAR) • Global Positioning Satellite system (GPS) • Wide-view camera • Motor controller(s) • Digital compass • On-board computer
Goals and Features • Autonomous • Waypoint-to-waypoint navigation • Obstacle avoidance • Stay within designated lanes • Overall goal: Place as high as possible in all competitions.
Challenges • Unpredictable LiDAR data • Integration of image processing and navigation • Field testing
Previous Milestones Milestone 1 (September 27th) • Write requirements document • Write design document • Write test plan • Evaluate functionality of machine • Evaluate completed programming/algorithms Milestone 2 (October 25th) • Begin documentation • Begin programming • Clean up existing code Milestone 3 (November 29th) • Finish refactoring on the project • Complete at least 80% of the navigation algorithm • Complete at least 70% of the image processing classes
Future Milestones Milestone 4 (February 21st) • Ready Navigation class for testing • Improve Think() function • Improve line and color detection • Improve camera frame rate and analysis Milestone 5 (March 28th) • Complete heavy field testing at least with LiDAR • Have showcase poster completed • Integrate image processing and LiDAR data Milestone 6 (April 25th) • Continue working on the vehicle (to perfect it) until the IGVC • Have integrated navigation field tested extensively • Complete User Manual • Record and edit Demo Video