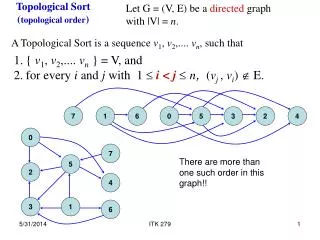
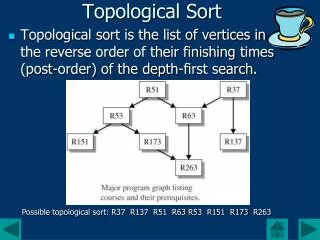
Topological Hole Detection
This paper explores methods for detecting topological holes in wireless sensor networks, crucial for monitoring remote areas like nature preserves during fire threats. By deploying thousands of sensor nodes, the network can organize, route messages, and identify firefronts while relying solely on connectivity information. The approach identifies boundary nodes in a communication graph, enabling efficient queries and applications such as landmark selection and virtual coordinate system construction. The study emphasizes the importance of connectivity in achieving effective topology exploration and environmental monitoring.

Topological Hole Detection
E N D
Presentation Transcript
Topological Hole Detection Ritesh Maheshwari CSE 590
Paper • S. Funke, “Topological Hole Detection and its Applications”, DIALM-POMC, 2005. • Basically, aim is to identify which nodes form the boundary, outer or inner (of holes), in a wireless sensor network
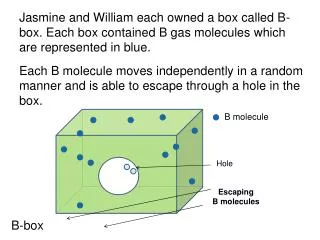
Motivation • Imagine a remote nature preserve • Long summer drought, resulting in • Wildfires! • Airplanes dropping thousands of cheap sensor nodes, so that the sensor network: • Organizes itself, routes messages • Identifies current firefront • Answers Queries efficiently
Motivation • Imagine a remote nature preserve • Long summer drought, resulting in • Wildfires! • Airplanes dropping thousands of cheap sensor nodes, so that the sensor network • Organizes itself, routes messages • Identifies current firefront => Hole Detection! • Answers Queries efficiently
Other Uses • Provide topology information to Location unaware protocols like GLIDER • Help in Landmark selection for GLIDER • Better Virtual coordinates in absence of Location Information
Assumptions • Region R • Every point in R is covered for sensing by atleast one sensor • Usually comm range larger than sensing range • Unit Disk Graph • No location information • Only connectivity information available
The continuous case • A beacon point • Construct contours of Euclidean distance from beacon • Observation: contours usually break at boundary
Discrete Case • No ‘points’ – only sensor nodes • No ‘distance’ measurement – only hop-count • Connected Components of same hop-count from beacon form contours
Discrete Case • Beacon – node p • dp(v) is hop-count from p to node v • I(k) = { v : dp(v) = k} is isoset of level k • I(k) may be disconnected, so resulting connected components are called C1(k), C2(k), C3(k)…..
Discrete Case • Boundary nodes are now the end nodes of the Connected Components - C1(k), C2(k) etc • Pick random node r in Ci(k) and find nodes in Ci(k) with highest hop-count from r • Usually, one beacon is not enough. They use 4
Beacon Selection • The 4 beacons should be as far away as possible • Choose 1st beacon randomly • Other 3 chosen on the basis of their distance from the 1st beacon
Distributed Implementation • Topology exploration done only rarely • Thus naïve implementation suits • Can be done by Flooding a constant number of times
Application: Landmark Selection in GLIDER • Landmarks divide the network into tiles using Voronoi diagrams • Local coordinate system constructed within each tile • When p in tilepwants to send packet to q in tileq, • Inter-tile: Packet is routed to a neighboring tile which is nearer to tileq than tilepand so on • Intra-tile: When reaching tileq, local coordinate system used to route to q
Solution: First Attempt • Observation: If 2 landmarks are on same hole boundary, then the hole cannot be totally inside one tile
Solution: Second Attempt • Hole Repulsion and Pruning
More Applications • To find Virtual Coordinates in presence of holes • Medial-Axis-Based Routing
Conclusion • Simple protocol • Only Connectivity info required • Hole detection => Event detection • But useful only for dense networks • Not that bad, as they assume cheap sensors