TOPOLOGICAL GRADIENT OPERATORS FOR EDGE DETECTION
TOPOLOGICAL GRADIENT OPERATORS FOR EDGE DETECTION. Hakan G. Senel Anadolu University, Turkey. Outline. Edge Detection Importance of Gradient Estimation A Better Gradient Estimation? Less smoothing Larger gradient kernel Problems of larger kernels

TOPOLOGICAL GRADIENT OPERATORS FOR EDGE DETECTION
E N D
Presentation Transcript
TOPOLOGICAL GRADIENT OPERATORS FOR EDGE DETECTION Hakan G. Senel Anadolu University, Turkey
Outline • Edge Detection • Importance of Gradient Estimation • A Better Gradient Estimation? • Less smoothing • Larger gradient kernel • Problems of larger kernels • Fuzzy Set Representation of Images and Fuzzy Image Topology • Degree of Connectedness Map (DOCM) • Properties of DOCM • Fuzzy Topology Based Gradient Estimation • Results • Conclusions
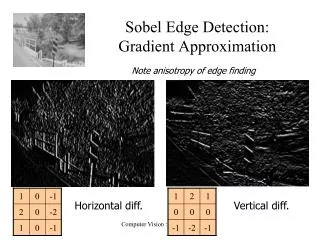
Edge Detection • Edge detection is the process of localizing pixel intensity transitions i.e. step edges • Typical algorithm • Compute directional derivatives (gradient kernels: Sobel, Prewitt, etc) • Find direction and magnitude • Threshold the magnitude (global or adaptive) • Operate on the binary image
Gradient Based Edge Detection • Common misconceptions about gradient based edge detection • Small kernel is necessary • Step edges must be detected • Smoothing is a must • Single size kernel is enough
Why Small Gradient Kernels? Small kernels are used • to avoid localization problems • to diminish the effects of near objects • to detect step edges • to increase computational performance
Small Kernel Sizes Small Kernels Require smoothing. Why? Derivative Filter F: sampling frequency, 2k+1: filter length
Small Kernel Sizes To determine derivative direction, we have two alternatives. Derivatives along x and y axes
Large Gradient Kernels • Yield better derivative approximation than small kernels • Better smoothing along the direction perpendicular to the derivative directions • Better directional estimate
Large Kernels • have problems • Smearing effect • Large response area around the edge • High computational requirements
How Can We Integrate Larger Kernels? • Objects that are not connected to the center pixel have to removed • Kernel response around an edge should be limited
Solution TOPOLOGICAL GRADIENT KERNELS
Images as Fuzzy Sets • Image is scaled between 0.0 and 1.0 and converted to fuzzy set • Each pixel value is converted to “degree of membership within the set of bright objects” • If applied to reverse image, each value becomes “degree of membership within the set of dark objects”
Fuzzy Topology Strength of a path “weakest link” Degree of connectedness: “strength of the strongest path”
Degree of Connectedness Map • In a neighborhood, degree of connectedness is assigned to its pixel • Visualization of how pixels are connected to the center pixel • Depicts the relationship between the center pixel and other pixels
input oenter pixel object 2 object 1 large object DOCM o Degree of Connectedness Map
Degree of Connectedness Map Let I be an image and p(x,y) denotes a pixel. I(x,y) is the intensity value of the image at point (x,y). W is a (2n+1)x(2n+1) observation window. Origin is denoted by (xo,yo). Degree of connectedness for bright objects is Degree of connectedness for dark objects is
Topological Gradient Results Slowly varying edge TG for bright objects magnitude TG for dark objects Conventional Sobel gradient x
Topological Gradient Results Slowly varying edge magnitude Conventional gradient x
Real Images Topological Gradient 9x9 in 11x11 Conventional Gradient 9x9
Real Images Topological Gradient 9x9 in 11x11 Conventional Gradient 9x9
Results A 1000x90 synthetic image that contains a ramp edge is formed.
Results • BR Blur rate is defined to assess the performance of TG
Results • R is defined as the resillience against noise on flat image areas
Results BLUR RATES AND RESILLIENCE FOR DIFFERENT NOISE LEVELS Topo. Sobel 11x11 Conventional Noisein 13x13 DOCM 11x11 Sobel σBR R BR R 0 0.000 0.00 0.099 0.00 5 0.164 19.31 0.176 47.16 10 0.203 38.88 0.216 95.55 15 0.235 57.65 0.251142.98
Conclusions • This paper presents a method to facilitate the use of large gradient kernels by • Limiting the gradient response area around the edge • Smoothing due to more samples to compute gradient • at the expense of computational requirements.