Download
1 / 1
10 likes | 125 Views
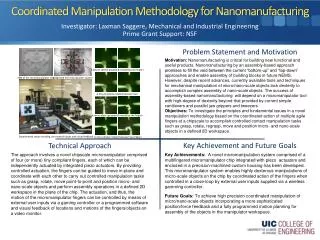
Investigating a novel manipulation method using agile fingers to achieve precise control of micro/nano objects in 2D space. Developed micromanipulator system enables complex manipulations for future nanoassembly operations.

E N D
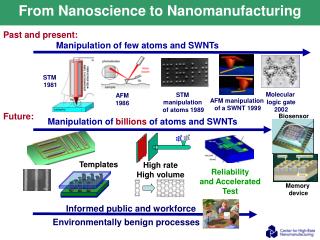
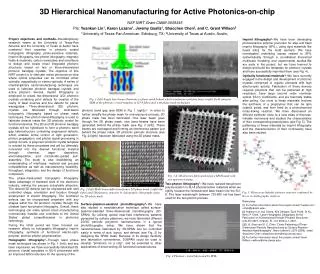
Coordinated Manipulation Methodology for Nanomanufacturing Investigator: LaxmanSaggere, Mechanical and Industrial Engineering Prime Grant Support: NSF Motivation:Nanomanufacturing is critical for building new functional and useful products. Nanomanufacturing by an assembly-based approach promises to fill the void between the current “bottom-up” and “top-down” approaches and enable assembly of building blocks in future NEMS. However, despite recent advances, currently available tools and techniques for mechanical manipulation of micro/nano-scale objects lack dexterity to accomplish complex assembly of nano-scale objects. The success of assembly-based nanomanufacturing will depend on a micromanipulator tool with high-degree of dexterity beyond that provided by current simple cantilevers and parallel jaw grippers and tweezers. Objectives: To investigate the principles and fundamental issues in a novel manipulation methodology based on the coordinated action of multiple agile fingers at a chipscale to accomplish controlled contact manipulation tasks such as grasp, rotate, regrasp, move and position micro- and nano-scale objects in a defined 2D workspace. A 20-mm sphere gripped & moved by two fingers Integrated micromanipulator system SEM of the micromanipulator chip A 20-mm sphere rotated between two fingers • The approach involves a novel chipscale micromanipulator comprised of four (or more) tiny compliant fingers, each of which can be independently actuated by integrated piezo actuators. By providing controlled actuation, the fingers can be guided to move in-plane and coordinate with each other to carry out controlled manipulation tasks such as grasp, rotate, move point-to-point and position micro- and nano-scale objects and perform assembly operations in a defined 2D workspace in the plane of the chip. The actuation, and thus, the motion of the micromanipulator fingers can be controlled by means of external user inputs via a gaming controller or a programmed software and visual feedback of locations and motions of the fingers/objects on a video monitor. Key Achievements:A novel micromanipulation system comprised of a multifingered micromanipulator chip integrated with piezo actuators and enclosed in a precision-machined custom housing has been developed. This micromanipulator system enables highly dexterous manipulations of micro-scale objects on the chip by coordinated action of the fingers when controlled in a close-loop by external user inputs supplied via a wireless gamming controller. Future Goals: To achieve high precision coordinated manipulation of micro/nano-scale objects incorporating a more sophisticated position/force feedback and a fully programmed motion planning for assembly of the objects in the manipulator workspace. A micro-object gripped & moved by the fingers Experimental setup including user control inputs and visual feedback A micro-object rotated between two fingers