Understanding Partial Derivatives and Differentiability in Multivariable Functions
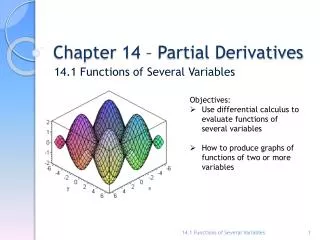
This overview covers the concepts of partial derivatives and differentiability of functions of two variables. A function ( z = f(x,y) ) is differentiable at a point ( (x_0, y_0) ) if its partial derivatives exist and meet specific conditions. The document outlines the properties of limits for functions of two variables, various rules (including sum, product, and quotient), and theorems related to continuity and differentiability. It also introduces definitions related to interior and boundary points, as well as level curves and surfaces.

Understanding Partial Derivatives and Differentiability in Multivariable Functions
E N D
Presentation Transcript
Partial Derivatives • Differentiable Function: A function z = f(x,y) is differentiable at (x0, y0) if fx(x0, y0) and fy(x0, y0) exist and Dz satisfies an equation of the form Dz = fx(x0, y0)Dx + fy(x0, y0)Dy + e1Dx + e2Dy, in which each of e1, e2 –> 0 as both Dx, Dy –> 0. We call fdifferentiable if it is differentiable at every point in its domain. • Theorem 1: Properties of Limits of Functions of Two Variables: The following rules hold if L, M, and k are real numbers and lim(x,y) –> (x0,y0)f(x,y) = L and lim(x,y)–> (x0,y0)g(x,y) = M. • Sum Rule: lim(x,y) –> (x0,y0) (f(x,y) + g(x,y)) = L + M • Difference Rule: lim(x,y) –> (x0,y0) (f(x,y) – g(x,y)) = L – M • Product Rule: lim(x,y) –> (x0,y0) (f(x,y) •g(x,y)) = L•M • Constant Multiple Rule: lim(x,y) –> (x0,y0)kf(x,y) = kL (any number k) • Quotient Rule: lim(x,y) –> (x0,y0) (f(x,y) / g(x,y)) = L / M M 0 • Power Rule: If r and s are integers with no common factors, and s 0, then lim(x,y) –> (x0,y0) (f(x,y))r/s = Lr/s provided Lr/s is a real number. (If s is even, we assume L > 0.) • Two-Path Test for Nonexistence of a limit: If a function f(x,y) has different limits along two different paths as (x,y) approaches (x0,y0), then lim(x,y) –> (x0,y0)f(x,y) does not exist. [Note: most often used when (x0,y0) is the point (0,0). The different paths are defined as y = mx. By evaluating lim(x,y) –> (0, 0)f(x,mx), if m remains in the result, then the limit varies along different paths varies as a function of m and therefore does not exist.] • Continuity of Composites: If f is continuous at (x0,y0) and g is a single-variable function continuous at f(x0,y0), then the composite function h = g o f defined by h(x,y) = g(f(x,y)) is continuous at (x0,y0). • Theorum 2: The Mixed Derivative Theorum: If f(x,y) and its partial derivatives fx, fy, fxy, and fyxare defined throughout an open region containing point (a,b) and all are continuoous at (a,b) then fxy(a,b) = fyx(a,b). • Theorum 3: The Incremental Theorum for Functions of Two Variables: Suppose that the first partial derivatives of f(x,y) are defined throughout an open region R containing the point (x0, y0) and that fxand fy are continuous at (x0, y0). Then the change Dz = fx(x0 + Dx, y0 + Dy) – f(x0, y0) in the value of f that results from moving from (x0, y0) to another point (x0 + Dx, y0 + Dy) in R satisfies an equation of the form Dz = fx(x0, y0)Dx + fy(x0, y0)Dy + e1Dx + e2Dy, in which each of e1, e2 –> 0 as bothDx, Dy –> 0 • Corollary of Theorum 3: Continuity of Partial Derivatives Implies Differentiability: If the partial derivatives fx and fy of a function f(x,y) are continuous throughtout an open region R, then f is differentiable at every point in R. • Theorum 4: Differentiability Implies Continuity: If a function f(x,y) is differentiable at (x0, y0), then f is continuous at (x0, y0). Definitions: Function of n Independent Variables: Suppose D is a set of n-tuples of real numbers (x1, x2, x3, …, xn). A real-valued functionf on D is a rule that assignes a unique (single) real number w = f (x1, x2, x3, …, xn) to each element in D. The set D is the function’s domain. The set of w-values taken on by f is the function’s range. The symbol w is the dependent variable of f, and f is said to be a function of the nindependent variablesx1 to xn. We also call the xj’’s the function’s input variables and call w the function’s output variable. Interior and Boundary Points, Open, Closed: A point (x0, y0) in a region (set) R in the xy-plane is an interior point of R if it is the center of a disk of positive radius that lies entirely in R. A point (x0, y0) is a boundary point of R if every disk centered at (x0, y0) contains points that lie outside of R as well as points that lie in R. (The boundary point itself need not belong to R.) The interior points of a region, as a set, make up the interior of the region. The region’s boundary points make up its boundary. A region is open if it consists entirely of interior points. A region is closed if it contains all of its boundary points. Bounded and Unbounded Regions in the Plane: A region in the plane is bounded if it lies inside a disk of fixed radius. A region is unbounded if it is not bounded. Level Curve, Graph, Surface: The set of points in the plane where a function f(x,y) has a constant value f(x,y) = c is called a level curve of f. The set of all points (x, y, f(x,y)) in space, for (x,y) in the domain of f, is called the graph of f. The graph of f is also called the surfacez =f(x,y). Level Surface: The set of points (x,y,z) in space wher a function of three independent variables has a constant value f(x,y,z) = c is called a level surface of f. Interior and Boundary Points for Space Regions: A point (x0, y0, z0) in a region R in space is an interior point of R if it is the center of a solid ball that lies entirely in R. A point (x0, y0, z0) is a boundary point of r if every sphere centered at (x0, y0, z0) encloses points that lie outside of R as well as points that lie inside R. The booundary of R is the set of boundary points of R. A region is open if it consists entirely of interior points. A region is closed if it contains its entire boundary. Limit of a function of Two Variables: We say a function f(x,y) approaches the limitL as (x,y) approaches (x0,y0), and write lim f(x,y) = L if , for every number e > 0, there exists a correspondingnumber d > 0 such that far all (x,y) in the domain of f, |f(x,y) – L| < e whenever 0< (x – x0)2 + (y – y0)2 < d. Continuous Function of Two Variables: A function f(x,y) is continuous at the point (x0,y0) if (1)f is defined at (x0,y0), (2) lim(x,y) –> (x0,y0)f(x,y) exists, (3) lim(x,y) –> (x0,y0)f(x,y) = f(x0,y0). A function is continuous if it is continuous at every point of its domain. Partial Derivative with Respect to x: The partialderivative of f(x,y) with respect to x at the point (x0,y0) is provided the limit exists. Partial Derivative with Respect to y: The partialderivative of f(x,y) with respect to y at the point (x0,y0) is provided the limit exists. [Note: In many cases, df/dx df/dy ] dff(x0+h,y0) – f(x0,y0) dxh 0 h dff(x0,y0+h) – f(x0,y0) dyh 0 h lim lim = = fxx = = ( ), fyy = = ( ) (x0,y0) (x0,y0) d2f ddf d2f d df dx2dx dx dy2dy dy (x,y) (x0,y0) fxy== ( )= fyx= = ( ) d2f ddf d2f d df dx dy dx dy dy dx dy dx • Notes: • When calculating df/dx, any y’s in the equation are treated as constants when taking the derivative. Similarly, when calculating df/dy, any x’s in the equation are treated as constants when taking the derivative. • Second order partial derivatives • F(x,y,z) = 0 implicitly defines a function z = G(x,y) • Implicit Partial Differentiation, e.g. find dz/dx of xz – y ln z = x + y. Treat y’s like constants. fx = fy = dxz – dy ln z = dx + dy xdz + zdx – ydln z = dx + dy xdz + z – y dz = dx + 0 dz = 1 – z dx dx dx dx dx dx dx dx dx dx zdx dx dx x – y/z
Partial Derivatives (continued) • Theorum 5: Chain rule for Functions of Two Independent Variables: If w = f(x,y) has continuous partial derivatives fx and fy and if x = (t) and y = y(t) are differentiable functions of t, then the composite function w = f(x(t), y(t)) is a differentiable function of t and df/dt = fx(x(t), y(t)) * x’(t) + fy(x(t), y(t)) * y’(t) , or • Theorum 6: Chain Rule for Functions of Three Independent Variables: If w = f(x,y,z) is differentiable and x, y, and z are differentiable functions of t, then w is a differentiable function of t and • Theorum 7: Chain Rule for Two Independent Variables and Three Intermediate Variables: Suppose that w = f(x,y,z), x = g(r,s), y = h(r,s), and z = k(r,s). If all four functions are differentiable, then w has partial derivatives with respect to r and s given by the formulas • Note the following extensions of Theorum 7: If w = f(x,y), x = g(r,s), and y = h(r,s) then • If w = f(x) and x = g(r,s), then • Theorum 8: A Formula for Implicit Differentiation: Suppose that F(x,y) is differentiable and that the equation F(x,y) = 0 defines y as a differentiable function of x. Then at any point where Fy 0, dy/dx = – Fx/Fy • Definition: Directional Derivative: The directional derivative of f at P0(x0, y0) in the direction of the unit vector u = u1i + u2j is the number • provided the limit exists. • Definition: Gradient Vector: The gradient vector (gradiant) of f(x,y) at a point P0(x0, y0) is the vector obtained by evaluating the partial derivatives of f at P0. • Theorum 9: The Directional Derivative Is a Dot Product: If f(x,y) is differentiable in an open • region containing P0(x0, y0), then , the dot product of the gradient f at P0 and u. [Note: Duf = fu = | f | |u| cos q = | f | cos q • Properties of the Directional Derivative Duf = f u = | f | cosq: • The function f increases most rapidly when cos q = 1 or when u is the direction of f. That is, at each point P in its domain, f increases most rapidly in the direction of the gradient vector f at P. The derivative in this direction is Duf = | f | cos (0) = | f |. • Similarly, f decreases most rapidly in the direction of –f . The derivative in this direction is Duf = | f | cos (p) = – | f |. • Any direction u orthogonal to a gradient f 0 is a direction of zero change in f because q then equals p/2 and Duf = | f | cos (p/2) = | f | * 0 = 0 also written as dw dfdx df dy df dz dt dx dt dy dt dz dt = + + dw dfdx df dy dt dx dt dy dt dw dw dx dw dy dt dx dt dy dt = + = + dw dw dx dw dy dw dz ds dx ds dy ds dz ds dw dw dx dw dy dw dz dr dx dr dy dr dz dr = + + = + + dw dw dx dw dy dr dx dr dy dr dw dw dx dw dy ds dx ds dy ds = + = + dw dw dx dr dx dr dw dw dx ds dx ds = = df f(x0 + su1, y0 +su2) – f(x0, y0) ds x 0 s ( )u,P0 (Duf)P0 = = lim df ds ( )u,P0 ∆ (Duf)P0 = = ( f)P0u ∆ ∆ ∆ df dfdx dy ∆ ∆ ∆ f = i + j ∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆