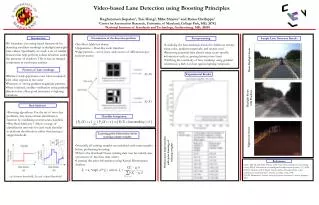
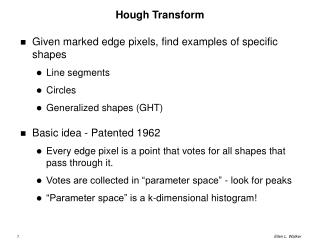
Vision-based Lane Detection using Hough Transform
Vision-based Lane Detection using Hough Transform. By: Zhaozheng Yin Instructor: Prof. Yu Hen Hu Dec.12 2003. Introduction. Application of lane detection : 1. Lane excursion detection and warning 2. Intelligent cruise control 3. Autonomous driving … Some lane detection algorithms

Vision-based Lane Detection using Hough Transform
E N D
Presentation Transcript
Vision-based Lane Detection using Hough Transform By: Zhaozheng Yin Instructor: Prof. Yu Hen Hu Dec.12 2003
Introduction • Application of lane detection : 1. Lane excursion detection and warning 2. Intelligent cruise control 3. Autonomous driving … • Some lane detection algorithms Edge-based, Deformable-template, B-snake…
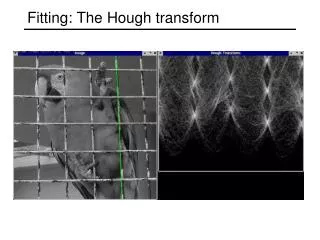
Approach (Edge-based) • Step 1: Get the edge information • Step 2: Hough Transform • Step 3: Search out the lane marking candidates • Step 4: Decide the lane marking
Approach • Step 1: Get the edge information Lost many edges
Approach • Step 1: Get the edge information (cont.) Use global histogram to find the background gray range and subtract it from the original image Compare these images Edges are preserved using background subtraction method Edge operation
Approach • Step 2: Hough Transform • An array is used to count how • many pixels belong to the line through • Hough Transform. • Another restriction is added: • Avoid detecting the fake lane markings
Approach • Step 3: Search out the lane marking candidates University Ave. Loop 4 in Beijing • The red lines are the first 20 lines which have the biggest count numbers in Hough parameter space. • For each lane marking in the real scene, there are many line candidates around it. • 3. There are some fake lines caused by the vehicle queue.
Approach • Step 4: Decide the lane marking 1. Sort the candidate lines by their position from left to right 2. Around each line cluster, choose the candidate which has the biggest count number as the lane marking in real scene 3. Delete the fake lane marking candidates 4. Calculate the mid-line of each lane (shown as green lines)
Result There is a little offset between the detected lane marking and that in real scene. This is because the lane is not completely straight and the lane mark is broken in the scene. This is a nice result
Discussion (effect of scratches 1) University Ave. Edge image Without restriction to Restrict Decide the lane markings Detected lane markings
Discussion (effect of scratches 2) University Ave. Restrict Note: Because lots of the edge information for the left lane marking are lost, there is an offset between the detected lane marking and that in the real scene Decide the lane markings Detected lane markings
Summary • Alg. works well for these straight lane cases. • Key methods includes: Find the background gray range, background subtraction, edge detection, Hough Transform, find the lane marking candidates, sort the lane marking candidates, group the cluster lines as one line, delete fake lines and calculate the mid-line of each lane • More complicate case (future work) Consider other methods, like deformable-template, multi-resolution Hough Transform, B-snake, multi-sensor fusion
Reference • Karl Kluge, Sridhar Lakshmanan, “A deformable-template approach to lane detection”, • Gonzalez, J.P.; Ozguner, U.; “Lane detection using histogram-based segmentation and decision trees”, • Yu, B.; Jain, A.K.; “Lane boundary detection using a multiresolution Hough transform”, • Yue Wang; Eam Khwang Teoh; Dinggang Shen; “Lane detection using B-snake”, • Others