Download
1 / 1
10 likes | 96 Views
This study presents a method to improve odometry accuracy in crawler vehicles by estimating slip ratios using encoders and gyro-sensor data. Experimentation validates the proposed system's enhanced performance in curve trajectory tracking. (Character count: 238)

E N D
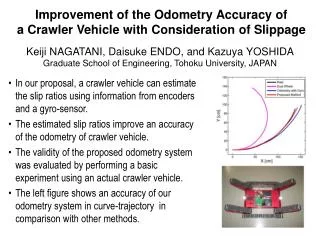
Improvement of the Odometry Accuracy of a Crawler Vehicle with Consideration of Slippage Keiji NAGATANI, Daisuke ENDO, and Kazuya YOSHIDAGraduateSchool of Engineering, Tohoku University, JAPAN • In our proposal, a crawler vehicle can estimate the slip ratios using information from encoders and a gyro-sensor. • The estimated slip ratios improve an accuracy of the odometry of crawler vehicle. • The validity of the proposed odometry system was evaluated by performing a basic experiment using an actual crawler vehicle. • The left figure shows an accuracy of our odometry system in curve-trajectory in comparison with other methods.