Download
1 / 37
370 likes | 486 Views
This document explores the duality in Euclidean space, focusing on estimating the 3D location of objects via their shadow planes. By analyzing the intersection of planes and utilizing optical rays, we derive methods for projecting points onto image planes. Key observations include the significance of the shadow plane and candidate planes that contain an intersection line. The framework presented provides insights into 3D photography and extends to potential applications in curves and crystallography, emphasizing the natural links to perspective projection.

E N D
The ‘plane space’ a ‘dual’ of the Euclidean space Jean-Yves Bouguet 9/30/97
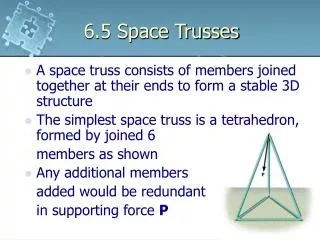
P P d s Historic: 3D Photography on your desk Light source Stick S Object Shadow plane Desk plane P Edge of the shadow Ls Goal: Estimate the 3D location of P
Principle Optical ray (Oc,xc) S Intersecting Ps with the optical ray (Oc,xc): Ps Ls P Pd xc Image plane ls Zc Oc Xc Camera Yc
What is Ps? Optical ray (Oc,xc) S The shadow plane Ps contains S and Ls: Ps Ls P Pd xc Image plane ls Zc Oc Xc Camera Yc
What is Ls? Optical ray (Oc,xc) S The line es is the projection of the edge Ls, or Ls is the intersection of the planes (Oc,ls) and Pd: Ps Ls P Pd xc Image plane ls Zc Oc Xc Camera Yc
Conclusion Optical ray (Oc,xc) S Ps Ls P Pd xc Image plane ls Zc Oc Xc Camera Yc
Preliminary observations: The key element is the shadow plane Ps Neither Ps nor Pd cross the origin Oc P s P d How do we write the math? Shadow plane ?? Ls
Definition of a plane P that does not cross the origin: Central objects: Planes P n Z P d Oc X Y normal vector distance to the origin with and Note: dot product
or: Central objects: Planes P n Z d Oc with: X Y Plane vector:
The ‘plane space’ P w w3 Z (W) Oc O w1 X Y w2 Euclidean space Plane space
Observation Pa Consider two planes Pa and Pb that intersect along the line L L Pb l Let l be the projection of L on the image plane Image plane Zc Oc Xc Yc
Observation (cont’d) Pa Parameterization: L Pb l Projected line: Image plane Zc Oc such that: Xc Yc with:
Observation (cont’d) Pa Proposition: L P Pb Proof: l Image plane Let P be a point on L Zc Oc 3D space Image plane Xc Yc
Observation (cont’d) Pa Proposition: L P Pb Proof (cont’d): l Image plane Zc Oc Xc Yc Note: dot product
Observation (cont’d) Pa L Pb w3 (W) l O w1 Image plane w2 Zc Oc Plane space Xc Yc
The dual of a line Perspective projection of L onto the image plane w3 Z Set of planes that contain the line L (W) Oc O w1 X Y w2 Euclidean space Plane space
The dual of a point P w3 Z (W) Oc O w1 X Set of planes that contain point P Y w2 Euclidean space Plane space
P s P d What about the shadow plane? Set of candidate shadow planes Where is the Shadow plane Ps? Perspective projection of Ls onto the image plane w3 Ls ? O w1 w2 (W) Need of an additional constraint!
P s P d Where is the shadow plane? (cont’d) Extra constraint: Dual of S S w3 Ls (W) O w1 w2 Shadow plane Ps:
P s P d Where is the shadow plane? (cont’d) Alternative method: Use of an extra plane Pr Projection of Lr onto the image plane Pr Lr O Ls (W) Shadow plane Ps: Note: Least squares estimate in case of noise
P P 1 2 Properties (1) L O (W) Intersecting planes
P P P P 2 1 1 2 Properties (2) Dual of the horizon line H Horizon line O (W) Parallel planes L (W) O Orthogonal planes
P P O Properties (3) P L2 L1 O Coplanar intersecting lines (W) vanishing point Horizon line V H L1 L2 (W) Parallel lines
P Properties (4) P L2 (W) L1 O Coplanar orthogonal lines (not shown)
P Properties (4) Set of orthogonal planes to P P L2 L1 O Coplanar orthogonal lines (not shown)
P Properties (4) Set of orthogonal planes to P P L2 L1 O Coplanar orthogonal lines (not shown)
P Properties (4) L3 Set of orthogonal planes to P P L2 L1 O Coplanar orthogonal lines (not shown)
P Example 1 Set of candidate ground planes Horizon line H O (W) Image plane Ground plane 1/d O d (W)
P Example 1 (cont’d) Ground plane V H (W) L2 L1 road lines O Image plane W a b Width of the road: Vanishing point
Example 2: Calibration V Horizon: Desk plane? (W) L2 L1 Grid edges O Image plane L3 L U L4 W Vanishing points
Example 2: Calibration V Set of orthogonal planes to the desk Grid edges (W) L2 L1 Grid edges O c a d Image plane b L3 L U L4 W
P s P d 3D Photography on your desk Shadow plane: S Ls 3D coordinates of P: is the plane of direction that contains
3D Photography on your desk S Ps Ls P Pd Image plane Z O X Note: Camera Y
Simple formalism Convenient for plane estimation Natural link with the perspective projection operator Vanishing points and Horizon lines are natural objects in that space Interesting features
There exists a strong similarity between this formalism and the way the Reciprocal Lattice is defined in Crystallography. Final remark Reference: “Solid State Physics” by Neil W. Ashcroft and N. David Merminl, Saunders College Publishing international Edition, Chapter 5, pp 85-94