Performance Comparison of Multicast Routing Algorithms with Bandwidth Reservation
This project explores multicast routing algorithms designed for efficient data transmission from a source node to multiple recipients. It delves into the Group Multicast Routing Problem (GMRP) and develops strategies to construct optimal multicast trees using greedy approaches. The study evaluates three algorithms: the Feasible Solution using adapted TM algorithm (FTM), Group-Shared Tree (STM), and a greedy-based approach (GTM), considering factors like bandwidth requirements, cost efficiency, and load balancing. Simulations are conducted on random graph structures to assess algorithm performance under varying load conditions.

Performance Comparison of Multicast Routing Algorithms with Bandwidth Reservation
E N D
Presentation Transcript
2001 Winter CS215 Course ProjectSimulation Comparison of Routing Algorithms for Multicast with Bandwidth ReservationZhihong Duan (zhihong@cs.ucla.edu)Mentor: Aiguo Fei(afei@cs.ucla.edu)
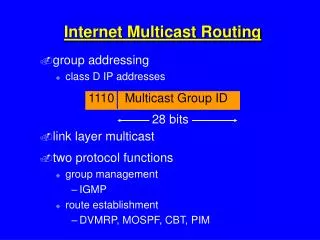
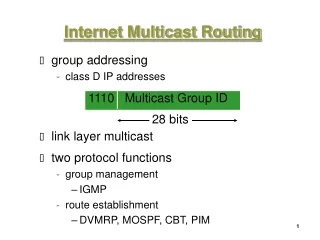
Multicast Routing • Multicast: simultaneous data transmission from a source node to a group of selected nodes • Tree structure is used to share links and minimize resource usage • Group Multicast Routing Problem(GMRP) is a generalization of multicast routing whereby all members of a group can be sources • Problem: find the “best” tree(s) to interconnect all member nodes
Multicast Routing Tree • Finding a least cost tree is NP-complete, greedy strategy is used often instead.( polynomial time) • Considerations in tree construction: • Feasibility: bandwidth requirement • Low Cost (network resource usage) • Load balancing (avoid congestion) • Easy to maintain (administrative overhead) • Two options: Source-based trees and Group-shared tree
A Greedy Procedure:TM • Many routing algorithms are greedy-based • TM Basic procedure: • Input graph(V,E), multicast group D size of m, root iD • Output multicast Tree Ti = (Vi, Ei) • Begin • Vi={i}, Ei= • While (Tihasn’t coverD) • Find PathP(v,u), whereu D-Vi, v Vi, P(v,u) satisfies the pre-set requirement • Vi= Vi {all nodes in P(v,u) except v} • Ei=Ei {all edges in P(v,u)} • End
Group TM Algorithm (GTM) • Source-based trees. • TM is used to construct a multicast tree Tn for each source node n. Shortest path has the highest priority to be chosen. • If saturated edges occur in Tn, giving up the saturated edges , • an alternative tree is constructed for n; • for all the previous built trees which use the saturated edges, alternative trees will be built also • The party having the smaller alternative overhead will give up the saturated edge and use the alternative tree(s)
1 1 1 0 3 0 3 34 0 1 1 6 4 1 4 2 4 2 4 2 25 T0 cost =37 T1 cost =37 T2 cost =37 9 20 20 3 0 1 3 2 2 15 4 2 13 5 3 1 3 4 1 1 0 0 0 4 2 4 2 4 2 T’0 cost =47 T’1 cost =47 T’2 cost =79 Overhead=42 Overhead=20
Feasible Solution using adapted TM algorithm for GMRP (FTM) • Source-Based Trees • TM is used to construct a multicast tree Tn for each source node n. Widest path (largest bandwidth capacity) has the highest priority to be chosen • No edge saturation problem. It maximizes success rate, always finds feasible solution if there is any • The trees have higher cost, but they keep better loading balance
Shared-tree TM(STM) • A Single Group-Shared Tree • Using similar greedy approach as TM, selecting the shortest path • Whenever we add a group member into the tree, it doesn’t not only receive data from the tree, but also send out data to the tree • Before we add a path into the tree, we need to check the bandwidth distribution among the tree and along the path
More Details about STM • During the process of constructing the tree, we keep bandwidth information for all the nodes already in the tree: • Br(i): the amount of bandwidth that could be injected into the sub-tree rooted at i • Brf(i) = min{Br(j), for all neighbors j of i} • When a node xn is going to connected to node x in tree via path P(x,xn), three conditions need to be satisfied • Bottleneck bandwidth along path P(x,xn) >= B(T) • Bottleneck bandwidth along path P(xn,x) >= Bxn • Brf(x) >= Bxn
More traffic could flow into the tree from x? B>Bxn? x xn B>B(T)? Partial tree 3 3 34 1 1 1 6 4 1 1 25 Choosing path P(0-4-2) From node 0 9 20 0 0 Brf(0) >1 B(2->4), B(4-->0) > 1 B(0->4,4->2) >2 1 3 2 2 0 15 2 4 13 5 3 4 2 4 Brf(0) = 5 Brf(1)=0 B(T)=2
Time complexity • Time complexity of three algorithms • m, number of multicast group • n, number of nodes in network • e, number of edges in network • m(n+e)n2 FTM • m2ne STM • m3n2 GTM
Simulations • Random Graph generation • Nodes are randomly placed on rectangle grids • Node are connected with the probability function • P(u,v) = exp(-d(u,v)/L) • = 0.3 , =0.4, d(u,v) is the distance between u and v, L is the possible longest path length • Each edge is assigned a cost of 1 • Bandwidth along the edge is either assigned uniformly between the maximal and minimal value or assigned an equal value • Each multicast group member consumes bandwidth of 1
Algorithms Performance study • All the simulation test are run on the three algorithms described above • Tree Cost: Working on a graph size of 100 • Light Load (bandwidth >> required) • Each edge is assigned bandwidth of 100 • Group size varies from 5-40, all member nodes are source nodes • Heavy Load • The bandwidth of the each edge is in the range of 4-8 • Number of sources is fixed as 5, group size varies from 5-40
Performance study continued… • How many active sessions can be accepted simultaneously with the routing algorithm? • Network size of 80, each edge is assigned bandwidth of 100, all sessions have same size of groups, varying from 5 to 40 • Static run • Feed as many sessions as the algorithm allows. Active sessions never leave • Dynamic run • Sessions come in as a Poisson process (), the lifetime of the sessions has an exponential distribution( average x)
Parameter selection for dynamic run • Number of sessions coming between two departures x • Select x larger than maximal number allowed during static run
Conclusions • Advantages of STM • It generates a group-shared tree, reduce the administrative overhead • Tree construction is incremental. It is easy to change the tree structure when member nodes join or leave, allowing dynamic membership. • The simulations results show that • Concerning the tree cost, STM performs as well as GTM, better than FTM • Concerning the number of active sessions a network could accept, FTM performs best, STM perform better than GTM
Acknowledgement • Aiguo Fei