Download
1 / 12
130 likes | 285 Views
Vibrations in linear 1-degree of freedom systems; I. undamped systems (last updated 2011-08-26). Aim.

E N D
Vibrations in linear 1-degree of freedom systems;I. undamped systems (last updated 2011-08-26)
Aim The aim of this presentation is to give a short review of basic vibration analysis in undampedlinear 1 degree-of-freedom (1-dof) systems.For a more comprehensive treatment of the subject, see any book in basic Solid Mechanics or vibration analysis.
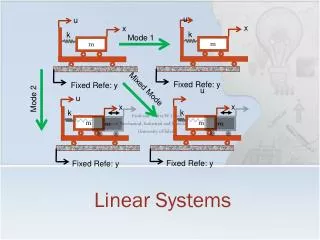
Linear 1-dof systems • A 1-dof system is a simplification of reality, where it has been assumed that themass of the body/structure • can be associated with one specific small part of the body • is restricted to one "major vibration mode" • A typical example of a situation for which a 1-dof assumption is applicable isa slender structure on which a single heavy detail is attached, where the lattermainly moves in one (translational or angular) direction, see below where themovement is depicted in blue. • The term linear 1dof-systems,implies that all the governingrelations are linear, whiche.g. is the case of a linear elasticstructure (material linearity), subjectedto so small deformations that theordinary stress and strain measuresmay be used (geometric linearity). lateral motion horizontal motion rotational motion
A simple example Let us study some basic phenomena of linear 1-dof vibration analysis(of un-damped) systems, by considering one of the simple examplesshown above! By making a free body diagram of the(point) mass, we get where the coordinate x describes the position of the mass (equal to thedeflection of the rod), and where the force S represents the interactionbetween the rod and the point mass. Elementary solid mechanics now gives
A simple example; cont. By introducing the lateral/bending stiffness k, we get or, by dividing with m and introducing the complete expression for F Thus, the lateral motion of the mass as a function of time is governed by alinear 2'nd order ordinary differential equation with constant coefficients! The solution is given by the sum of the homogeneous solution and theparticular solution, , where the former corresponds to theself vibration of the mass caused by the initial conditions (placement andvelocity), while the latter is caused by the applied force.
A simple example; cont. Homogeneous solution For the homogeneous solution we have As can be seen, for free vibrations with F=0, the point mass can only vibratewith the frequency , which we refer to as the natural frequency oreigenfrequency of the structure. By denoting it , we get
A simple example; cont. Homogeneous solution; cont. Alternatively we may express this as A & B or X & ϕ are found byusing the initial conditions Since we in all physical contexts have some kind of damping, i.e. processesthat transform the mechanical energy into e.g heat, it follows that theself vibration caused by some initial conditions sooner or later will vanish.Thus, at such a stationary state ("fortvarighet" in Swedish), only the particularsolution will remain. It can finally be noted that the circular eigenfrequency fe and the eigenperiodTe are defined as
Resonance Homogeneous solution; cont. We may also analyze the eigenfrequency of a structure/body by theFinite Element method (FEM), see below where an animation of thevibration mode (eigenmode) can be found for a similar type of structure.
A simple example; cont. Particular solution For the particular solution we let As can be seen, for forced vibrations the displacement amplitude willdepend on how close to the eigenfrequency the applied frequence is.Theoretically, we will get infinite amplitudes for the case .We refer to this as resonance!
A simple example; cont. Particular solution; cont. It may be noted that the particular solution can be recast in another form,as illustrated below where the factor is the so called dynamic impact factor
Resonance As we saw above, the amplitude of the particular solution goes to infinity whenthe applied frequency approaches the eigenfrequency of the system. Since theobtained particular solution is not valid for this case (we are not allowed todivide by zero), we instead have to proceed as follows
Resonance On the previous slide we found that the amplitude of the forced vibration atresonance grows linearly with time i.e. we get the type of behaviorillustrated to the right Even though (as will be seen later on) damping will make the theoreticalvibration amplitude finite, it may still be very large near the "resonance"frequency. The same is true for multi-dof systems and continuous systems.As a consequence, all engineering designs must be designed such that theyare not operated in a resonance region, since that inevitably will causepremature failure unless additional damping devices are used.