Download
1 / 36

E N D
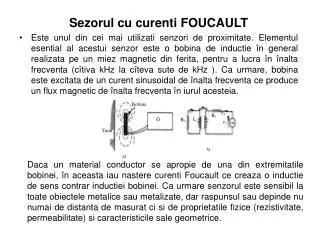
Sezorul cu curenti FOUCAULT • Este unul din cei mai utilizati senzori de proximitate.Elementul esential al acestui senzor este o bobina de inductie în general realizata pe un miez magnetic din ferita, pentru a lucra în înalta frecventa (cîtiva kHz la cîteva sute de kHz ). Ca urmare, bobina este excitata de un curent sinusoidal de înalta frecventa ce produce un flux magnetic de înalta frecventa înjurul acesteia. Daca un material conductor se apropie de una din extremitatile bobinei, în aceasta iau nastere curenti Foucault ce creaza o inductie de sens contrar inductiei bobinei. Ca urmare senzorul este sensibil la toate obiectele metalice sau metalizate, dar raspunsul sau depinde nu numai de distanta de masurat ci si de proprietatile fizice (rezistivitate, permeabilitate) si caracteristicile sale geometrice.
Curentii indusi creati de fluxul magnetic oponent, tind sa reduca inductanta bobinei. Un circuit de masura a acestei inductante va produce o iesire proportionala cu curentiii Foucault indusi. • Acesti senzori pot fi utilizati pentru masurarea distantei până la o suprafată metalizata, sau pentru localizarea unei fante. O teorie simplificata de functionare a acestui tip de senzor poate fi stabilita reducînd obiectul metalic la un circuit cu constante localizate cuplat mutual cu bobina de excitatie. • Daca se noteaza : Z1=R1+jL1, Z2=R2+jL2, impedanaa proprie a bobinei, impedanta echivalenta a obiectului, respectiv inductanta mutuala dintre acestea, se deduce: unde k este coieficientul de cuplaj între bobinasi obiect, dependent de pozitia relativa dintre acestea.
1. Senzor cu curenti Foucault-circuit unic • Pentru a utiliza un singur circuit de excitatie, senzorul este asociat cu un dispozitiv mecanic de baleiaj ce permite explorarea suprafetei unde se afla acesta. • Miscarea de baleiaj a bobinei si curentii Foucault din zona fantei permit localizarea acesteia din urma pe baza analizei semnalului din bobina.
Deoarece senzorul este situat deasupra defectului (fantei) prezenta acestuia se traduce prin diminuarea curentilor Foucault în aceasta zona. • Se poate astfel aprecia simultan distanta dintre senzor si piesa, prin nivelul tensiunii continuie Vc , pozitia mijlocului fantei prin masurarea lui Vm si largimea fantei printr-o derivare a semnalului iesit din senzor. În aceasta situatie, trecerea prin zero a semnalului derivat va marca mijlocul defectului, iar frontierele acestuia marginile. • În practica însa miscarea de baleiaj a captorului prezinta inconvenientul ca poate fi sediul unor vibratii.
2. Senzor cu curenti Foucault-circuit dublu • Tot pentru eliminarea mişcării de baleaj şi furnizarea directă a semnalului diferenţial se recurge la o măsurare pe ieşirile a două bobine între care se află defectul. • Dacă acest semnal este nul calajul este realizat pe mijlocul fantei. Variante ale acestui tip de senzor au fost dezvoltate de către firmele MATERIALDATA/AB, CEA/UGRA, FIAT, HITACHI, UNIWELD, MITSUBISHI HEAVI INDUSTRY. • Majoritatea lor recurg la acest procedeu pentru poziţionarea robotului în raport cu bisectoarea unghiului format între diverse laturi ale piesei de prelucrat. • Calajul se realizează dacă distanţele d1 şi d2 sunt egale.
3. Senzor cu curenti Foucault-circuite multiple • Este evident că odată cu utilizarea mai multor circuite se pot determina şi alte mărimi (înălţimea , orientarea, etc.) senzorului în raport cu obiectul de interes pentru robot. Pentru a înlătura ambiguităţile de interpretare, de obicei se separă măsurările făcute cu diferite bobine. • Astfel senzorul din figura de mai jos (stanga) cuprinde două bobine centrale B1 şi B2 pentru detecţia defectului şi o bobină exterioară B3 pentru măsurarea distanţei. Cel reprezentat în figura de mai jos (dreapta) cuprinde 4 bobine permiţând poziţionarea defectului (B1-B2) distanţa medie între senzor şi obiect (B2-B3), şi orientarea senzorului în raport cu normala (B3-B4). • Variante ale acestui senzor permit determinarea si a altor parametri ai procesului (lătimea fantei, releveul acesteia, etc). În topul acestor realizări se situiază WELDING LABORATORY PITTSBURGH, CARNEGIE-MELLON UNIVERSITY, CEA/UGRA-ENSET, OXFORD UNIVERSITY, ENSET.
În figurile urmatoare este prezentată realizarea CEA/UGRA-ENSET în vedere generală şi detaliu.
Senzorul cu efect Hall • Efectul Hall se manifesta prin aparitia unei diferente de potential VH perpendicular pe liniile de curent ale unui conductor plasat într-un cîmp de inductie B. • Tensiunea Hall depinde de directia si valoarea lui B si este consecinta fortelor Laplace ce se exercita asupra sarcinilor electrice în miscare. • Senzorul Hall este constituit dintr-o sonda semiconductoare parcursa de un curent la bornele careia este masurata tensiunea Hall si dintr-un magnet permanent ce produce un cîmp de inductie B a carei valoare pe sonda depinde de poziia sa. • Unul din elemente, sonda sau magnetul permanent este fix, iar celalalt legat la obiectul mobil. Pentru a reduce problemele inerente legate de circuite electrice în miscare ce pot fi sediul unor semnale de nivel mic, de obicei sonda este cea fixa. În acest caz pentru a nu perturba miscarea obiectului, masa magnetului permanent trebuie sa fie relativ mica,ceea ce limiteaza plaja în care inductia este masurabilasi limiteaza domeniul de masurare.
Interesul pentru acest senzor este ca permite masurarea pozitiei sau a deplasarii unui obiect situat dincolo de un perete feromagnetic. Tensiunea furnizata de sonda Hall are forma: • unde C este sarcina electronului, n este densitatea electronilor, e grosimea sondei, I curentul prin sonda, BN inductia normala pe planul sondei. Constanta Hall este dependenta de temperatura pana la valori de ordinul 1%/0C, ceea ce face ca acest senzor sa nu poata fi folosit decît în medii cu temperatura constanta, compensarea erorilor fiind destul de complicata. Masurandul la care este direct sensibil senzorul de proximitate este componenta normala BN a inductiei magnetice; sensibilitatea corespunzatoare este:
Daca elementul Hall este utilizat ca un senzor de pozitie, magnetul permanent care creaza inductia constituie un corp de proba primar, pozitia sau deplasarea modificînd masurandul secundar care este BN, si ca urmare sensibilitatea traductorului este: • Sensibilitatea la pozitie a senzorului Hall de proximitate este deci proportionala cu gradientul inductiei normale, gradient ce depinde de natura magnetului si de pozitia lui în raport cu sonda. • Se obtin în mod curent sensibilitati de 5-15mV/mT iar dupa amplificare în prezenta unei tensiuni de decalaj: 0,2-15V/mm, pentru o plaja de masurat de ordinul 1mm si o liniaritate mai buna de 1,5% din intervalul de masurare. Senzorul de proximitate cu efect Hall în asociatie cu un Trigger-Schmitt se integreaza ca detector de proximitate.
Senzorul magnetorezistiv • Se bazeaza pe o rezistenta a carei valoare depinde de inductia magnetica în care este plasata, determinarea pozitiei facîndu-se indirect prin dependenta de aceasta a inductiei magnetice. • Conform cu cercetarile lui L.T.YUAN referitoare la utilizarea magnetorezistentei ca senzor de proximitate pentru domeniul robotilor, se poate obtine o relatie liniara între variatia de rezistentasi deplasare daca aceasta este adusa progresiv dintr-o regiune de inductie nula într-o regiune de inductie B uniforma prin deplasarea paralel cu curentul ce o traverseaza. • Rezistenta R a senzorului este în acest caz suma dintre rezistena R1(B) a partii supusa inductiei B si rezistenta R2(0) nesupusa inductiei:
si utilizand notatiile din figura: se obtine: Rezistenta fiind alimentata cu un curent I constant, variatia dVm a tensiunii la bornele sale este proportionala cu dx: unde sînt respectiv rezistivitatile la inductia B si la inductia nula. Influienta temperaturii este redusa la minimum utilizînd o punte Wheatstone cu ajutorul a patru magnetorezistente plasate de asa natura încat variatiile lor sunt egale si opuse.
Cu magnetorezistentele obisnuite de 550Ωsi la o inductie de aproximativ 1,2 T se obţine o sensibilitate de 8,8 V/mm, pentru un interval de mssurare de 0,5mm si o liniaritate de 0,7%. • Magnetorezistenta poate fi utilizatasi ca detector de proximitate în asociatie cu un tranzistor, prezenta sau absenta inductiei în locul unde aceasta este plasata, prezenta sau absenta ei în zona de actiune a inductiei, determinînd conductia sau blocarea tranzistorului.
SENZORI DE PROXIMITATE CAPACITIVI • Capul de măsură este format dintr-un conductor cilindric şi o anvelopă metalică coaxială realizând un condensator de capacitate fixă C1. Dacă obiectul de detectat se apropie de extremitatea conductoarelor precedente, formează împreună cu acestea alte două condensatoare: • unul având o armătură, suprafaţa extremă a conductorului central şi obiectul situat la distanţa x, ce are capacitatea direct dependentă de x, C(x); • celălalt este un condensator parazit format între anvelopa exterioară şi obiect, de capacitate Cp(x).
Capacitatea Cm se modifică în prezenţa obiectului: Măsurarea acestei capacităţi se poate efectua cu ajutorul unei punţi sau prin metode de deviaţie. O exemplificare a măsurării prin metoda punţii este prezentată în figura: Dacă obiectul şi anvelopa exterioară a senzorului sunt conectate la masă, capacitatea Cp(x) poate fi scurtcircuitată, realizându-se astfel: Tensiunea de dezechilibru a punţii, dependentă de deplasare este: Ce fiind capacitatea condensatorului de echilibrare.
Dacă deplasarea se efectuează în jurul unei poziţii D0 avem şi iar tensiunea de dezichilibru corespunzătoare unei delasări d este: Acest tip de senzor este interesant deoarece furnizează un răspuns indiferent de metalul din care este confecţionată ţinta cu condiţia ca suprafaţa acestuia să fie curată. Dezvoltări şi imbunătăţiri ale performanţelor unor astfel de senzori capacitivi cu aplicaţii în robotică sunt anunţate de către o multitudine de constructori şi cercetători.
SENZORI OPTICI • Elementele sensibile optice de proximitate au căpătat o mare dezvoltare în ultimul timp deoarece ele lucrează la distanţă de obiectul de detectat şi ca urmare nu complică mult braţul robotului în locul limitat în care acesta efectuează diverse operaţii. • De aceea numeroase laboratoare de cercetare au dezvoltat o varietate imensă de senzori bazate pe utilizarea fie a luminii policromatice fie a celei monocromatice, dar mai ales a laserelor. • Funcţionarea unui senzor de proximitate optic constă în punerea în evidenţă a prezenţei sau a formei unui obiect prin detectarea acestuia într-un volum limitat sau prin sesizarea întreruperii de către acesta a unui fascicul luminos. Pentru aceasta un emitator de lumină constituit dintr-un LED, lampă cu incandescenţă sau laser generează un fascicul luminos ce este recepţionat după reflexia de obiectul de detectat de către o fotodiodă, fototranzistor sau celulă fotovoltaică.
Detecţia proximetrică În cazul detecţiei proximetrice receptorul analizează energia reflectată de obiect într-o zonă particulară situată pe axa fasciculului incident. Emiţătorul şi receptorul se găsesc deci unul în apropierea celuilalt zona activă fiind cu atât mai importantă şi informaţia asupra localizării obiectului va fi mai fină cu cât distanţa dintre ele va fi mai mică. Detecţia de trecere • Sistemul de detecţie de trecere asigură punerea în evidenţă a unui obiect prin întreruperea variaţiei fascicolului luminos incident. Se cunoasc două sisteme disponibile: • sistemul baraj - când emiţătorul şi receptoul sunt situate de o parte şi de altă parte a liniei optice. Această tehnică asigură detecţia unor obiecte de dimensiuni mari; • sistemul reflex - ce utilizează pe lângă emiţător şi receptor un reflector. Principiul constă în realizarea detecţiei proximetrice a unui obiect cunoascut reprezentat de reflector şi detecţia obiectului necunoscut prin analiza comparativă a întreruperii fascicolului reflectat.
Detectorul optic în cuadratura ( cuadrantul ) • Dispozitivul cuprinde patru diode cu catodul comun a caror anozi sînt independenti, fiecare acoperind suprafata unui cuadrant. Interceptia fascicolului luminos de catre celula determinata de fiecare cuadrant de suprafată SA, SB, SC, SD, si curentul dat de fiecare dioda este proportional cu suprafata: unde Sd este sensibilitatea diodei, fluxul fascicolului incident, S0 sectiunea fasciculului: Se poate verifica imediat ca pozitionarea fascicolului dat este determinata unic: • dupa axa x de valorile ariilor SA+SD sau SB+SC adica de curentii IA+ID sau IB+IC; • dupa axa y de ariile SA+SB sau SC+SD adica de curentii IA+IB sau IC+ID.
Cum în mod inevitabil fascicolul luminos în general de sectiune circulara este usor excentric fata de detector, coordonatele acestuia vor fi date de: • abcisa x0, de evaluarea (SA+SD)-(SB+SC) adica a curentilor (IA+ID)-(IB+IC); • ordonata y0, de evaluarea (SA+SB)-(SC+SD) adica a curentilor (IA+IB)-(IC+ID). Ca urmare în urma unui calcul electronic a curentilor mai sus mentionati se determina cu precizie pozitia centrului fascicolului independent de sensibilitatea Sd a fotodiodelor: unde k este constanta determinat experimental a senzorului.
Fotodioda cu efect lateral Ca şi diodele fotoelectrice clasice, fotodioda cu efect lateral, are o zonă extinsă cuprinsă între două regiuni n şi p polarizate invers. Prin efect fotoelectric, lumina incidentă crează în această zonă separarea de către câmpul electric, a perechilor electron-gol, dirijând electronii spre regiunea n şi golurile spre regiunea p. Din punct de vedere constructiv, ea dispune de 4 electrozi, câte doi pentru fiecare regiune, echipotenţiali, X1, X2, respectiv Y1, Y2 plasaţi pe direcţii perpendiculare.
Regiunile n şi p fiind pur ohmice, curentul fotoelectric colectat prin fiecare dintre ele se repartizează între electrozii echipotenţiali ai perechilor respective (X1, X2) sau (Y1, Y2), astfel încât căderile lor de tensiune să fie identice: x1, x2 şi y1, y2 fiind distanţele punctului de impact al fascicolului luminos în raport cu X1, X2, Y1, Y2. • Se pune imediat în evidenţă schema echivalentă a fiecărei regiuni conductoare n şi p sub forma unui portenţiometru al cărui cursor este poziţionat de fascicolul luminos şi alimentat printr-o sursă de curent constant corespunzătoare curentului fotoelectric Dacă reperul impactului (x0, y0) al fascicolului luminos din sistemul de axe rectangulare al cărui origine este 0 este în centrul diodei şi dacă axa OX este perpendiculară la X1, X2, iar axa OY este perpendiculară la Y1, Y2: • De unde rezultă:
După un calcul electronic simplu se obţin coordonatele de impact ale fascicolului luminos, ce permit centrarea braţului robotului în raport cu un anumit reper dat. • De aceia senzorii de proximitate optici sunt de cele mai multe ori integraţi dispozitivului de prindere a robotului. In aceste condiţii, este necesară o dispunere a fotoelementelor astfel încât să se poată studia în volum zona de acţiune a senzorului. In această direcţie sunt de remarcat realizările dezvoltate de JET PROPULSION LABORATORY, ce permite exploararea a 13 zone şi NASA LABORATORY ce rezolvă baleierea spaţiului prin asocierea senzorului optic cu prisme Fresnel.
Camere de luat vederi • Cele mai moderne sisteme de analiză a arealului în care evoluează robotul sunt cele bazate pe camere de luat vederi. • Camerele de luat vederi pot fi active sau pasive. • În realitate numai senzorii 3D sunt sau pot fi activi. • Captorii de imagini sunt sisteme ce convertesc imaginea formată de un spot de radiaţii (luminoase, ultrasonore, X etc.) într-un semnal electric exploatabil prin dispozitive de conversie adecvate. • Există o mare diversitate de principii de realizare a senzorilor de imagini: • camere de televiziune, • camere digitale, • transductoare de imagini • sisteme active.
Camere tip televiziune a.) Analizorul de imagine • Este un tub vidat ce are la o extremitate un fotocatod ce converteşte fotonii incidenţi în electroni, iar la cealaltă extremitate un electrod prevăzut cu o mică gaură în spatele căreia se găseşte un multiplicator de electroni. Un sistem de lentile electronice permite numai electronilor proveniţi dintr-o foarte mică porţiune a fotocatodului să traverseze gaura electrodului, furnizând la ieşirea multiplicatorului cu curent proporţional cu lumina incidentă unei mici porţiuni a regiunii explorate. • Camera are, de asemenea, posibilitatea de a selecţiona regiunea explorată prin poziţionarea sistemului de lentile, şi de a balea imaginea cu o viteză mică pentru a nu interveni zgomotul datorat micşorării timpului de integrare a curentului pe fiecare porţiune a elementului de integrare a curentului pe fiecare porţiune a elementului explorat. • Deşi cea mai veche posibilitate de captare a imaginii, deşi lent, analizatorul de imagine rămâne cel mai utilizat în sistemele de inspecţie înainte şi după poziţionarea prin alte principii, a robotului (”ochiul” robotului”). • O solutie moderna este utilizarea convoluţiei în timp real a două imagini preluate de la două analizatoare, exploatând faptul că valoarea curentului detectat corespunzător unui anumit sector explorat este funcţie de: • iluminarea punctului • timpul de expunere
b.)Analizatorul de negative • Este o variantă a analizatorului de imagine ce permite analiza negativelor fotografice plasate în spatele unui ecran fosforescent. Lumina corespunzătoare unui punct este focalizată pe un fotomultiplicator. Se poate astfel balea punct cu punct negativul obţinându-se o foarte bună rezoluţie. Deşi de mare rezoluţie, analizatorul este lent şi ca urmare este utilizat numai în sistemele de inspecţie post şi pre- manipulare ale robotului c.) Tubul tip Vidicon • Tubul Vidicon sub una din numeroasele sale variante echipează toate camerele de televiziune actuale. Diferenţa faţă de analizatoarele de imagini constă într-un tun electronic care balează cu viteza constantă un mozaic fotoconductor depus pe un film metalic transparent. • Lumina sosind pe filmul în cauză, traversează şi sensibilizează mozaicul schimbându-i rezistivitatea. Când fascicolul de electroni balează de asemenea mozaicul, curentul cules prin film depinde de rezistivitatea punctului acţionat el însuşi de fascicolul luminos. Pentru ca valoarea curentului să nu depindă decât de iluminare trebuie ca timpul între două treceri ale spotului de electroni să fie constant. Sistemul este deci cu acces secvenţial şi nu aproape aleator ca la analizatorul de imagini. • Tuburile Vidicon datorită largilor utilizări sunt ieftine şi ca urmare foarte utilizate în construcţia roboţilor.
Dispozitivele cu transfer de sarcini CCD • Sunt elemente sensibile la imagini de tip solid. Soliditatea CCD (charge couped devices) nu constă numai în robusteţea lor la şocuri dar şi în avantajele de greutate, de volum şi de compatibilitate cu sistemele informatice. Sunt prin urmare senzorii actuali dar si de viitor ai roboţilor. • Din punct de vedere constructiv, ele se prezintă sub forma unei barete sau matrici de elemente fotosensibile (fotodiode, structuri MOS): • structura cu fotodiode: • elementul sensibil este o fotodiodă clasică polarizată invers. Sarcinile create de fotoni sunt stocate pe un electrod cu structura MOS. • structura MOS: • fotonii incidenţi crează sarcini electrice în siliciu. Aceştia se acumulează pe o grilă polarizată foto-MOS, fie pe o suprafaţă de oxid de siliciu (DDC de suprafaţă) fie în volumul unui canal implantat (DDC de volum). • Pe lângă aceste matrici de fotosenzori, DDC comportă registre de lectură şi amplificatoare de ieşire. Astfel, sarcinile acumulate pe elementele fotosensibile sunt transferate registrelor de lectură (în tehnologie de suprafaţă sau de volum) ce dirijează pas cu pas spre ieşire semnalele utile prin amplificare tensiunilor variabile pe electrozi.
Transductoarele de imagini • Sunt convertizoare de imagini de tip incoerent-coerent ce se axează pe exploatarea imaginilor în timp real. • Principiul constă în formarea imaginii scenei de explorat în lumina incoerentă pe un cristal activ şi iluminarea acestuia cu lumina coerentă, astfel că fascicolul emis sau reflectat este modulat spaţial proporţional cu intensitatea locală a imaginii. • Un astfel de transductor a fost dezvoltat de HUGHES RESEARCH LABORATORY. El este realizat sub forma unui sandwich compus dintr-o placă de sticlă, un electrod conductor transparent, un strat fotoconductor din sulfură de cadmiu, o oglindă, un cristal lichid, un alt electrod şi o altă placă de sticlă. Între cei doi electrozi se aplică o tensiune alternativă. • Un fascicul de lumină polarizată liniar soseşte din stânga, se reflectă pe oglinda dielectrică şi traversează cristalul lichid de două ori şi reiese cu o polarizare eliptică. Un analizor situat la ieşirea fascicolului nu lasă să treacă decât componentele cu polarizare perpendiculară la direcţia de polarizare perpendiculară originală a fascicolului de lectură. După această analiză se constată că distribuţia spaţială a intensităţii fascicolului citit este aproximativ proporţională cu distribuţia spaţială a intensităţii imaginii de intrare. Prototipurile realizate anunţă rezoluţii de 25 microni pentru o suprafaţă a imaginii de 25 mm2, cu un contrast 100/1 şi o durată a lecturii de 30 ms.
Senzor optic de imagini activ • Senzorul activ are ca principiu trimiterea unui fascicol şi măsurarea luminii recepţionate de scenă, măsurarea făcându-se la distanţă printr-un ansamblu de puncte, dând deci imagini în relief. Tehnologia optima constă în trimiterea unui fascicol luminos cunoscut (plat sau în cruce) şi înregistrarea imaginii fascicolului cu o cameră de televiziune sau CCD. • O a doua tehnologie constă în baleearea cu un laser a scenei de înregistrare, putând fie măsura timpul de parcurs al undei de la emitere la recepţionare, fie modificarea fazei fascicolului reflectat faţă de cel incident modulat în amplitudine. • Pentru devierea fascicolului, sunt utilizate sisteme de oglinzi rotitoare şi deviatoare optico- acustice. • Pentru sistemele de vedere 2D sau 3D se propun diverse tipuri de senzori funcţie de aplicaţie, utilizând stereoviziunea şi metoda triangulaţiei prin stereoviziune, ce vizează înlăturarea următoarelor dificultăţi: • dacă imaginile sunt puţin diferite, măsurarea în relief este foarte sensibilă la zgomote; • corespondenţa între punctele a două imagini ale aceleaşi scene este greu de stabilit; • măsurarea punctelor situate la distanţă este mai precisă decât acelor apropiate.
Sisteme de viziune 2D Viziunea 2D este cea obţinută prin intermediul vederii unice furnizând o imagine plană a scenei observate. Pentru piesele de mică dimensiune se poate utiliza o cameră unică cu post fix, iar dacă piesa este mai mare se vor utiliza mai multe camere situate în diverse locuri legate de punctele unde se doreşte un recalaj de traiectorie. Sistemele de viziune actuale existente pe piaţă sunt de tipul cu mai multe camere. O altă soluţie constă în situarea camerei de luat vederi pe însăşi robotul în cauză, situaţia în care trebuie să se aibă în vedere precizia sa şi aportul acesteia în precizia globală a sistemului.
Sisteme de viziune selectivă • Sistemele de viziune selective sunt sensibile numai la o anumită parte a radiaţiei luminoase. Pentru aceasta în faţa obiectivului camerei este plasat un filtru interferenţial care nu este sensibil decât la lungimea de undă corespunzătoare acestuia. • În general se utilizează o iluminare laser pentru formarea unui plan luminos care intercepteaază obiectele de dectat. • Astfel că o cameră poate fi asociată mai multor lasere pentru reperarea diverselor detalii sau puncte ale piesei. Decalajul unghiular între sursa emiţătoare şi axa camerei permite ca prin metoda triangulaţiei să se obţină informaţii de distanţă între diversele repere.
Variante îmbunătăţite ale acestui sistem sunt dezvoltate de AUTOMATIX şi GENERAL MOTORS. De obicei, acestea utilizează fie o sursă de radiaţie suplimentară policromatică, fie două camere CCD şi sursă laser protejată, pentru realizarea percepţiei 3D
Senzori şi camere de luat vederi în infraroşu • Sunt specifici roboţilor de sudură şi de manipulare a lingourilor incandescente în turnătorii şi metalurgia feroasă şi neferoasă. Relevarea temperaturilor şi energiilor în gama infraroşu din proximitatea arcului sau a piesei incandescente este dată în figura de pe slide-ul urmator. În funcţie de modul de acţiune al senzorului de infraroşu aceştia pot fi cu măsurare punctuală, liniară sau de suprafaţă. a) Măsurarea punctuală • În această situaţie senzorii de infraroşu măsoară temperatura a două zone a piesei de studiat situate de o parte şi de alta a fantei. Un asemenea senzor realizat de GENERAL ELECTRIC permite urmărirea fantei plecând de la o măsurare diferenţială. Diferenţa măsurilor furnizate de cei doi senzori în infraroşu, (V1-V2) oferă informaţii asupra calării robotului pe fantă iar suma acestora, (V1 + V2) asigură controlul penetrării cordonului.
b.) Ridicarea profilului termic • Analiza distribuţiei temperaturii pe piesa asupra căreia se acţionează permite măsurarea dimensiunilor băii. Acest procedeu a fost pus în aplicare de WELDING INSTITUTE Canada. • Un fascicul de fibre optice transmit semnalele până la matricea de captori în infraroşu. Pentru fiecare senzor elementar este asociată o fibră optică, pentru a obţine o imagine simplificată şi permiţând prelucrarea rapidă a informaţiei. O variantă a acestui senzor dezvoltată la acelaşi institut utilizează de asemenea, profilul termic al piesei dar în asociaţie cu o mişcare de baleaj sau de citire termică în linie. • Firmele GENERAL ELECTRIC şi HGH dezvoltă pe acest principiu senzori în infraroşu complexi ce furnizează atât informaţii relative la profilul termic cât şi la calitatea acesteia.
SENZORI FLUIDICI Principial, aceşti senzori oferă posibilitatea măsurării proximetrice prin măsurarea presiunii unui fluid (aer comprimat) dirijat spre ţinta în cauză. Reglarea distanţei între ţintă şi proiectorul gazos se face funcţie de debitul măsurat (a) Senzorul descris în figura (b) permite evaluarea proximetrică a unei fante în V prin măsurarea diferenţială a presiunilor pe cele două proiectoare dirijate spre flancurile fantei. a) b) Acest sistem este capabil să măsoare şi distanţa până la o fantă dreptunghiulară, precum şi dimensiunile acesteia, prin măsurarea diferenţială a presiunilor pe cele două elemente ale captatorului menţinute în preajma piesei printr-un dispozitiv cu aer sub presiune. Senzorii fluidici sunt mai puţin utilizaţi în ultimul timp în robotică datorită dificultăţilor tehnologice pentru a obţine precizia cerută. În plus jetul gazos poate perturba mediul în care evoluează robotul.
SENZORI PROXIMETRICI BAZAŢI PE MĂSURAREA LUNGIMII ARCULUI Sunt specifici roboţilor de sudură. Principiul acestor senzori constă în măsurarea pe care electrică a lungimii arcului în raport cu suprafaţa de referinţă. Determinarea lungimii arcului se face prin intermedul unor măsurări de curent şi tensiune. Dacă sursa de curent utilizată este cu caracteristică verticală, tensiunea este direct legată de lungimea arcului prin relaţia: unde: U - este tensiunea arcului, Ua - căderea de tensiune anodică, Uc - căderea de tensiune catodică, l - lungimea arcului, k - coeficient dependent de tipul operaţiei. În condiţii bine determinate de natura electrozilor, a gazului, a debitului acestuia şi a curentului I, această caracteristică este liniară de forma: cu a şi b constante. Pentru sursele cu caracteristică orizontală (tensiune constantă), măsurarea curentului este direct legată de lungimea Deoarece există numeroase surse ce fac ca, fie lungimea arcului, fie intensitate curentului să varieze, este necesară o măsurare diferenţială. Acest procedeu constă în devierea magnetică a arcului