Download
1 / 24
240 likes | 336 Views
2013. november. GPS = NAVSTAR , ГЛОНАСС , GALILEO vagy BEIDOU ?. Kovács Béla / Zentai László Térképtudományi és Geoinformatikai Tanszék. Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest, Pázmány Péter sétány 1/A. Történelem:.

E N D
2013. november GPS = NAVSTAR, ГЛОНАСС, GALILEO vagyBEIDOU? Kovács Béla / Zentai László Térképtudományi és Geoinformatikai Tanszék Eötvös Loránd Tudományegyetem, Informatika Kar Térképtudományi és Geoinformatikai Tanszék 1117 Budapest, Pázmány Péter sétány 1/A
Történelem: • Klasszikus helymeghatározás (kronométer, sextáns, térkép) • Doppler effektus • LORAN-C, DECCA, OMEGA • A „csillagháborús terv”, TRANSIT • NAVSTAR vs. ГЛОНАСС • GALILEO (?), BEI DOU(Compass) 2013. 11. 18. GPS EA
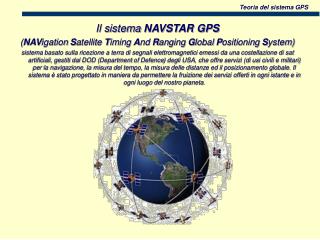
Global Position(ing) System • Globális helymeghatározó rendszer • A Földön (és környezetében) • Időjárástól, helyszíntől független • „Csak” tiszta rálátás kell az égboltra • Bárki által használható • Korlátozható 2013. 11. 18. GPS EA
A GPS rendszerek felépítése • A (z) űrszegmens • A földi követő / vezérlő állomások • A rendszer felhasználói (GPS műszerek) 2013. 11. 18. GPS EA
NAVSTAR (USA, Dep. of Def.) terv:24/ ma:31 műhold (Rockwell International) ~20.200 km magasságban keringenek 6 pályasík (3-4-5 műhold/pályasík) 55° pályainkl. az egyenlítő síkjához viszonyítva A pályasíkok 30°-onként az egyenlítő mentén 4 követő és 2 követő/vezérlő állomás (Hawaii, Ascencion, Diego Garcia, Kwayalein, Colorado Springs) 11 óra 58 perc keringési idő ~650-1500 kg, ~6 m nyitott napelemekkel 2013. 11. 18. GPS EA
NAVSTAR GPS 2013. 11. 18. GPS EA
ГЛОНАСС (CCCP, ma Oroszország) 24(27)/ma:24 műhold 19.100 km magasságban keringenek 3 pályasík (8+1 műhold/pályasík) 56-64.8° az egyenlítő síkjával bezárt szög A pályasíkok 120°-onként 11 óra 15 perc keringési idő/ kb.~1500 kg 25 hold 1996-7-ben már volt, ma újra 24 db üzemel Krasznoznamenszk (Moszkvai régió) + n*CTS Időalap: Mengyelejevo, UTC + 3.00h +19s (+10s)
GLONASS GPS 2013. 11. 18. GPS EA
Galileo (Európai Unió – civil üzem.) 30 műhold / 3 pályasík (9+1 műhold/pályasík) 2005-ben volt az első műhold pályára állítása 23 616 km, 56° p. inlkináció, 14 óra 4 perc keringési ~700+ kg, (ma is csak 4db. kering) új(?) frekvenciák L5 (E5A-B) 1164-1215MHz, (E6- 1260-1300 MHz), E2-L1-E1 1559-1591 MHz !!! Pozitívum: civil, független, pontosság, integritás adatok akár 6 másodpercen belül, ingyenes Negatívum: civil (pénzforrás), várhatóan 4-8 év mire rendszerbe áll, új vevők kellenek (?) L1! 2013. 11. 18. GPS EA
GALILEO GPS 2013. 11. 18. GPS EA
BEIDOU2 (北斗卫星导航系统) Compass (A BeiDou 1 (ejtsd: pejtou) továbbfejlesztése) kódnéven ismert rendszer 27MEO+5GEO+3HEO műhold lesz a végleges/vö. Galileo adataival… 2007 április - az első műhold pályáraállítása 21 500-36 000 km pályamagasság új(?) frekvenciák E1, E2, E5B, E/ (vö: Galileo) ! jelenleg 14+ műhold kering, ebből 1 driftelGEO-n 2013. 11. 18. GPS EA
Compass - 北斗卫星导航系统 2013. 11. 18. GPS EA
2013-ban a GPS=NAVSTAR ? ГЛОНАСС = 27/24 (tervezett/működő) NAVSTAR = 24 / 31 GALILEO = 30 / (4) COMPASS = 35 / 13+ NEM!!! De azért ma már/még igen!
Működési elv: 1 ismert táv R=20.200 km Gömbfelületen bárhol 2013. 11. 18. GPS EA
Működési elv: 2 ismert táv R1=20.200 km R2=20.199 km A két gömbfelület metszésében lévő körön R1 R2 2013. 11. 18. GPS EA
Működési elv: 3 ismert táv, trianguláció R1=20.200 km R2=20.199 km R3=20.201 km A három gömbfelület metszésében 2 pont!!! R1 R2 R3 2013. 11. 18. GPS EA
Működési elv: 4 ismert táv = egyértelmű R1=20.200 km R2=20.199 km R3=20.201 km R4=20.202 km 1 pont!!! R1 R2 R3 R4 2013. 11. 18. GPS EA
Egyszerű... Az egyszerű ívhátrametszéses helymeghatározás kiterjesztése a világűrbe Előny a nagy távolság A műholdak pontos pályántartása Az atomórák „pontossága” – a mérés alapja 0.000 000 000 000 sec. időmérési tartomány s = v * t 2013. 11. 18. GPS EA
Hibaforrások • Véletlen hibák, zaj (átlaga nem módosítja a pontosságot) • Szisztematikus v. „szabályos” hibák (egy irányba húz) • Durva hibák (felhasználó) • Rádiófrekvenciás (jammer) hibák • Multipath • A fentiek kombinációi (horror) • … 2013. 11. 18. GPS EA
Hibajavítási technikák • Differenciális módszerek • LBAS, GBAS, SBAS • WAAS, EGNOS, MSAS • Omnistar, Landstar • „user error” kiküszöbölése • „hardware error” 2013. 11. 18. GPS EA
WAAS/EGNOS/MSAS SBAS (Space Based Augment. System) 2013. 11. 18. GPS EA
Alternatív felhasználása a rendszernek:pl. geocaching, kukásautó monitoring /BKV, autóbuszközlekedés/Pécs Mire használható még? 2013. 11. 18. GPS EA
Magyarország geoládái (~3700db.) (2013. novemberi adatok) 2013. 11. 18. GPS EA
Budapest és vonzáskörzete (kb 250 doboz) 2013. 11. 18. GPS EA