Download

1 / 16
160 likes | 332 Views
Morphological Feature Extraction for Automatic Registration of Multispectral Images. 一种形态学上的多谱图像特征提取配准算法. 摘要.

E N D
Morphological Feature Extraction for Automatic Registration of Multispectral Images 一种形态学上的多谱图像特征提取配准算法
摘要 图像配准可以分为两部分:图像的控制点(control points)或者特征提取,以及在待配准的图像中搜索与提取出的特征相匹配的特征。手工提取特征点的方法带有很大的主观性,很耗时间,而且往往提取的特征点无用。另一方面,自动特征提取允许采用不变的对象特征点,例如边缘、转角,交叉点等作配准的标志。在本文中,我们扩展了形态学方法,提出了一种在无人监管的情况下自动提取地标chips和相应windows的多谱图像配准算法。一旦获取一系列的chip-window对,我们采用一种基于多分辨率的小波分解特征匹配算法,分等级地进行配准。算法在配准由ALI(Advanced Land Imager)多谱仪器以及由NASA地球卫星(Observing-1)上的Hyperion光谱仪器获取的图像时非常有效。
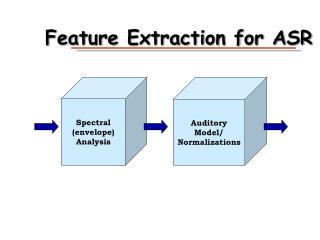
1. INTRODUCTION The general process of image registration includes three main steps: 1) Extraction of features to be used in the matching process; 2) application of a feature matching strategy subject to a specific metric; 3) resampling of the data based on the correspondence computed from matched features. 图像配准的一般过程包括3个方面: 1)提取匹配过程中的特征点; 2)依据一个特定的尺度进行特征点匹配; 3)基于相关计算,从匹配特征中重采样数据;
当前图像配准的研究工作组要集中在上面的Step1和Step2阶段,或者全景配准,或者是围绕参考图像的特征点或界标的几幅chip,与输入图像中的相关windows配准。有个假设的前提:一旦配准系统可操作,需要建立类似界标chips的数据库。自动提取chips的能力和数据库的独立性。当前图像配准的研究工作组要集中在上面的Step1和Step2阶段,或者全景配准,或者是围绕参考图像的特征点或界标的几幅chip,与输入图像中的相关windows配准。有个假设的前提:一旦配准系统可操作,需要建立类似界标chips的数据库。自动提取chips的能力和数据库的独立性。 在本文中,我们扩展了一种新提出的形态学方法,用来从遥感图像中自动提取参考chips和相关的窗口。这种方法适合多谱图像的自动配准。本文组织如下,第二部分介绍了当前新提出的形态学方法,该方法是能够实现自动特征提取的方法。第三部分介绍了如何修改形态学提取算法,以适应多谱图像的处理;第四部分提供实验结果以证明算法;第五部分是全文的总结和展望。
II. MORPHOLOGICAL FEATURE EXTRACTION 数学形态学是个非线性的图像处理技术,开始的时候引入基本的算子,建立对图像的处理。利用特定的空间特性(例如形状和大小),称为结构要素(structure element),在图像的空间域进行变换。结构要素的作用相当于滤波器,提取或者特定的图像结果。
III. EXTENSION TO MULTI/HYPERSPECTRAL IMAGES 第二部分讨论的SOMP算子已经应用在当前的研究中,用于从参考图像中自动提取一系列的地标chips,以及在无人监管的情况下从输入图像中查找相关的windows。SID(Spectral information divergence,光谱信息发散)首次用于建立输入图像与参考图像之间的基于SOMP分布的初始匹配,接着采用(分等级的)健壮特征匹配(RFM)程序,接着在各个等级的分解中采用多分辨率过完备小波分解算法进行chip和window特征的提取。 尽管当前的算法对配准单光谱Landsat图像的特征提取非常有效,但是并没有提及以下对配准多谱图像数据非常关键的几个方面:
我们当前的算法没有集合任何cloud(云层)检测程序,因此我们的配准过程非常容易受大气因素(例如云层和影子)的影响。为了解决这个问题,我们采用了光谱离析技术,用于从输入图像中自动探测云层(和它们的影子)等信息。特别的,我们考虑数据中的全光谱信息,采用文献[7]和文献[9]中所提的ATGP(automatic target generation process,自动目标生成程序)。在第二次采用ATGP时候,能够提取出正交图像中的最不一样的像素信息。这些像素(常常与云层。或者云层的影子信息有关)被用于标记出云层/影子区域,通过线性分离技术移出这些信息数据。 如果待配准的两幅图像之间存在旋转变换,直接采用SOMPs进行比较并不能够解决问题。SOMPs方法可以看作是一幅直方图,图中表明了在不同的规模和方向上的变换角度)。因此,如果我们计算每个像素这样的直方图,然后旋转图像,再次计算直方图,直方图中bin的次序将会不一样,即使是参考相同的图像像素点。为了说明这个问题,我们以递减的次序简单的定义直方图中的bins,采用SID测量来进行光谱相似度匹配。
综合考虑上面的问题,我们基于SOMP算法的步骤如下:综合考虑上面的问题,我们基于SOMP算法的步骤如下:
IV. EXPERIMENTAL RESULTS 我们采用由ALI多谱相机与Hyperion hyperspectral相机获取的图像测试第三部分提出的算法。尽管相机是安装在同一平台上,但是它们的光谱维数是不同的。表1所示为ALI的9个光谱带,和Hyperion的光谱带。 在本文中,我们各从ALI和Hyperion中选择了一条单一的光谱带,如图1所示,ALI是band 7,Hyperion是band 106.两幅图像都是256×3352像素。两幅图像都受到强烈的大气因素干扰。
应用本文的算法对图像进行处理(k=5和m=8),获得5个chip-window对,如图2所示。因为ALI-Hyperion图像宽度很窄(只有256像素),我们只能很小心的调整提取出的chip-window对的大小。所用的chip-window对,除了第二对调整到96×96像素,都调整到128×128像素。因为第二对接近图像边界,这样我们就不能够提取到128×128像素大小的window。如图2所示,所有的chip-windws对都不受clouds/shadows的影响。应用本文的算法对图像进行处理(k=5和m=8),获得5个chip-window对,如图2所示。因为ALI-Hyperion图像宽度很窄(只有256像素),我们只能很小心的调整提取出的chip-window对的大小。所用的chip-window对,除了第二对调整到96×96像素,都调整到128×128像素。因为第二对接近图像边界,这样我们就不能够提取到128×128像素大小的window。如图2所示,所有的chip-windws对都不受clouds/shadows的影响。
应用本文的算法,我们得到如表2所示的配准结果。采用本文算法获得一个全局变换量为11.48度(),与人工获得的结果11.34度()相似,这表明我们的自动配准算法能够在不需要预处理的情况下获得精确的配准结果。应用本文的算法,我们得到如表2所示的配准结果。采用本文算法获得一个全局变换量为11.48度(),与人工获得的结果11.34度()相似,这表明我们的自动配准算法能够在不需要预处理的情况下获得精确的配准结果。
V. CONCLUSIONS AND FUTURE RESEARCH 本文提出了一种全自动多谱图像配准系统。系统由两部分组成,首先,采用形态学上的特征提取技术,获取视觉上重要的界标(例如边缘、边角和交叉点等)的SOMPs(scale-orentation morphological profiles)中心。这些轮廓用于自动提取一系列初始匹配chip-window对,然后采用健壮特征匹配(RFM, robust feature matching)技术对这些匹配对进行精确处理。通过对ALI和Hyperion相机获得的图像进行测试,证明了SOMP-RFM算法的有效性。尽管实验结果非常好,但是需要对算法再深入研究,以充分适应全光谱图像的配准。