Download
1 / 17
170 likes | 318 Views
Principal Components Analysis and Neural Network Implementation of Photometric Stereo. Yuji Iwahori, Robert J. Woodham, Ardeshir Bagheri (1995). 1 Introduction. Photometric Stereo( 照度差ステレオ ) の実装. Principal Components Analysis ( 主成分分析 ).

E N D
Principal Components Analysis and Neural Network Implementation of Photometric Stereo Yuji Iwahori, Robert J. Woodham, Ardeshir Bagheri (1995)
1 Introduction Photometric Stereo(照度差ステレオ)の実装 Principal Components Analysis (主成分分析) ある空間から、次元を落として部分空間を抽出するための線形処理テクニック。計算能力の問題(ill-conditioned)を解決するために用いる。 Neural Network 非パラメットリック関数を近似する特性を利用して、入力空間とそれに対応する表面配向のマッピングを学習する。データは校正球面から得る。影や相互反射の影響による信頼性の評価に用いる。
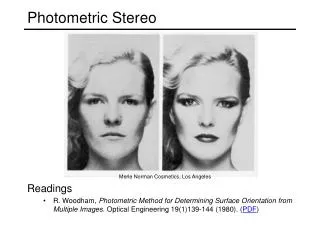
2 Photometric Stereo (1) 物体の表面 :Z方向は観察者への方向 正射影によって、2次元画像に投影される 表面法線ベクトル :ベクトル長は1とする 画像照度方程式 :画像照度 :反射率マップ
2 Photometric Stereo (2) p方向からの光源によって、p画像を使用する時の画像照度方程式 全ての照明の方向がほぼ同一線上にあった場合 問題発生(ill-conditioned) Principal Components Analysis(主成分分析)
3 Principal Components Analysis (1) PCAは多変量解析の手法の一つ。もとの変数間の類似性に基づいて、新たな少数の変数へと集約する。 主成分 新たな変数 主成分は対象データの「分散」を最大化するように設定される。また、主成分同士は互いに独立である。 最終的に変数を集約するために、もとの変数よりも少ないだけの主成分を抽出する。
3 Principal Components Analysis (2) 主成分を求めるために、共分散行列の固有方程式を解き、固有値と固有ベクトルを求める。 共分散行列は、対角要素が各変量の分散 、それ以外の第ij要素はi番目の変量とj番目の変量の共分散 となっている行列のこと。
3 Principal Components Analysis (3) • p入力画像からp×pの共分散行列を計算する。 • 固有ベクトル と固有値 を求める。 列が であるp×p行列を とする。 画像照度を とする。
4 NN Functional Approximation4.1 RBF Networks and OLS Learning (1) Radial Basis Function neural network 多次元解析に用いられる非関数近似の方法の一つ。学習によってフィードフォワードネットワークを構成する。 ガウス関数 基底関数 基底関数の出力を線形結合することによってネットワークの出力とする。 Orthogonal Least Squares (直交最小2乗法) 近似値と観測値との残差の2乗を求め、それを最小とするような近似関数を求める方法。基底関数の中心を選択するのに適用される。十分なネットワークが構成されるまで、その手続きは繰り返される。
4 NN Functional Approximation4.1 RBF Networks and OLS Learning (2) RBFネットワークは2層から成る(図はPの隠れ層と、3つの出力層から成る)。 1度の学習手続きによって、ニューロンが1つずつネットワークに追加される。2乗和誤差が目標値に達するか、またはニューロンの数が最大になるまで繰り返される。 図: Radial Basis Function Neural Network 本手法では2つのRBFネットワークを構成 第1のネットワークは入力から表面配向を予測
4 NN Functional Approximation4.2 A 2nd Network Estimates Confidence さらに入力を逆に予測するようなネットワークを生成 第2のネットワークは出力された表面配向から入力を予測 実際の入力と逆予測された入力を比較し、信頼評価を行う(影や相互反射に影響される領域)。
5 Experiments5.1 Experimental Setting 5.2 Calibration 陶器の球体(キャリブレーション用)と陶器の男性の顔を使用する。ともに同じ物質であり、同じ反射特性を持つ。 光学台に対象物を取り付け、光源の角度を約2度ずつずらしながら7方向からの画像を撮影する。
共分散行列 、固有ベクトル 、固有値 は以下となる。共分散行列 、固有ベクトル 、固有値 は以下となる。 5 Experiments5.3 Results (1) 固有値の大きい順に3つの主成分を用いる
5 Experiments5.3 Results (2) キャリブレーションによって得られた値をプロット 照度(E1,E2,E3)は直線に沿って集中し高い相関がある。一方、主成分(A1,A2,A3)は相関が低くなっている。 図(a) Plot of (E1,E2,E3) 図(b) Plot of (A1,A2,A3)
5 Experiments5.3 Results (3) RBFネットワークの学習 キャリブレーションによって得た、(A1,A2,A3)と(n1,n2,n3)の対応を各ネットワークに学習させる。 第1のネットワーク 一般化 50世代まで学習 第2のネットワーク 妥当評価 100世代まで学習 図(a) (A1,A2,A3) to (n1,n2,n3) 図(b) (n1,n2,n3) to (A1,A2,A3)
5 Experiments5.3 Results (4) 観察者(カメラ)の方向を向いた像の画像の場合 • 7つの入力画像の一つ (b) 勾配角度(表面法線ベクトルと観察方向のベクトル間の角度) (c) アスペクト(表面法線ベクトルのXY平面上への射影) (d)信頼評価d(明るい領域は信頼が低い、影や相互反射) (a) Boy-1 image (b) Boy-1 slope (c) Boy-1 aspect (d) Boy-1 confidence
5 Experiments5.3 Results (5) 位置を変更した像の画像の場合 • 7つの入力画像の一つ (b) 勾配角度(表面法線ベクトルと観察方向のベクトル間の角度) (c) アスペクト(表面法線ベクトルのXY平面上への射影) (d)信頼評価d(明るい領域は信頼が低い、影や相互反射) (a) Boy-2 image (b) Boy-2 slope (c) Boy-2 aspect (d) Boy-2 confidence
6 Conclusion 照度差ステレオの新しい実装方法を提案 • 主成分分析によって対象データの次元を減少させる。 • RBFニューラルネットワークとOLSによって、入力空間と表面法線ベクトルとの対応マッピングを生成。 • RBFニューラルネットワークによって、影や相互反射の影響を受けている領域の信頼評価。 この実装方法は、経験的な手法によってのみ行われ、光源方向や反射率等の条件を必要としない。対象物体と同じ物質(同じ反射率)からなる物体の校正によるデータさえあればよい。