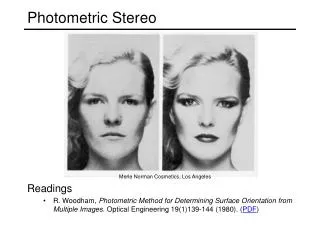
Photometric Stereo Reconstruction
300 likes | 498 Views
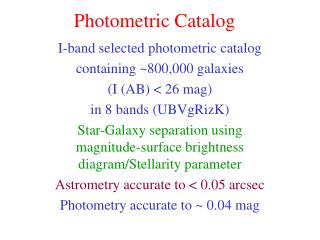
Photometric Stereo Reconstruction. Dr. Maria E. Angelopoulou. (1). Photometric Stereo (PS) Basics. Input images: same viewpoint / different illumination directions Varying albedo values → minimum of 3 illumination directions

Photometric Stereo Reconstruction
E N D
Presentation Transcript
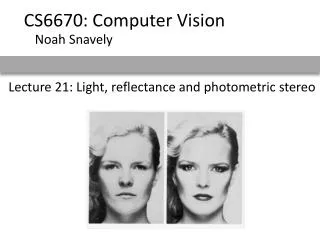
Photometric Stereo Reconstruction Dr. Maria E. Angelopoulou
(1) Photometric Stereo (PS) Basics • Input images: same viewpoint / different illumination directions • Varying albedo values →minimum of 3 illumination directions • The measured pixel intensities and actual albedo for a given patch o are related as follows • Outputs: orientation & albedo of each surface facet • Height map produced after integration of the surface normals. 2
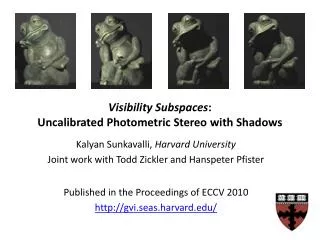
Pros & Cons of PS Compared to Conventional Stereo Pros + ability to operate on featureless objects + absence of feature matching errors + computational simplicity Cons controlled imaging conditions inaccurate simplifying assumptions need for off-line calibration sessions & exclusive access to the imaging system 3
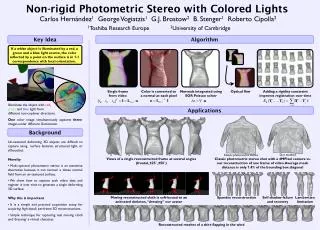
Objective Provide an autonomous, purely data-driven PS reconstruction system that is suitable for real-life applications. Focus on: uncalibrated flatfielding & uncalibrated light estimation. Diffuse light component as a degradation factor for intended directional lighting. Indicate up to which ratio of ambient to directional light component photometric stereo gives useful reconstruction outputs. 4
The Inverse-Square Law of Light Propagation • Fundamental assumption of PS: The variation in brightness for a given pixel is solely dependent on the angle between the illumination vector and the surface normal at the corresponding real-world surface facet. • In practice the inverse-square law of light propagation renders the above assumption inaccurate. • To correct the input data appropriately, flatfielding may be employed. Flatfielding employs a set of reference images captured at a dedicated imaging session under the same imaging conditions as the main session. The illumination variations of the reference images is solely due to inhomogeneities of the system.
Standard Calibrated Flatfielding Technique Use a grey piece of card as calibrating device. Photograph the card multiple times under the same illumination as the main imaging session. Perform 2D 2nd order polynomial fitting on the flatfielding reference images to smooth out high frequency noise. This gives the illumination fields . For every point of the image plane, the new pixel value is computed as (2) 6
Uncalibrated Flatfielding • Intensity values decrease across the kth illumination field from the brightest point to the darkest point. Due to the inverse-square law, the 2D illumination field can be approximated with • Only radial distance matters, and thus • Placing the origin of the Cartesian coordinate system at the brightest point: (3) (4) (5) 8
(7) Uncalibrated Flatfielding • Employing constraints (4) and (5), we get: (6) • In (6) the origin of the coordinate system moves to the brightest point of each kth image. Instead of moving the origin for each k, it is more convenient to express (6) on the fixed image coordinate system as:
Uncalibrated Flatfielding (11) • Find the values of the brightest and darkest points: (8) (10) (9) • Consider the location of the brightest and darkest points:
PS Reconstruction • no flatfielding, (b) calibrated flatfielding, (c) uncalibrated flatfielding
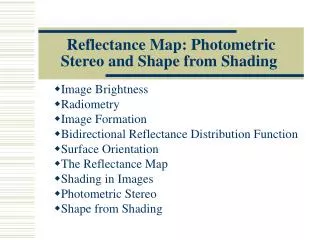
Standard Calibrated Estimation of Illumination Directions - The relationship between surface gradients and brightness is captured by the reflectance map of the surface. - A Lambertian sphere illuminated by a point source in direction has a reflectance map of the form: (12) - Let denote the global maximum of the kth reflectance map. It is (13) 16
Standard Calibrated Estimation of Illumination Directions - Thus the surface orientation that maximizes the Lambertian reflection component is the one for which the normal vector points to the illumination source! - Let the gradient at surface patch o be . - If patch o is projected at pixel , then the measured image intensity at that pixel is given by the image irradiance equation as . (14) 17
Standard Calibrated Estimation of Illumination Directions - Due to equations (14) (13) and the global maximum of the Lambertian reflectance map corresponds to the maximum intensity measurement , the luminous dot. If the latter resides at and is the projection of the real-world patch m then (15) - If a Lambertian sphere is photographed, the normal vector can be recovered at any point and can be estimated once the luminous dot is identified. 18
Uncalibrated Estimation of Illumination Directions • The proposed uncalibrated illumination vector technique targets the human face class. • A human face can be realistically approximated with a 3D ovoid that is reconstructed on top of the face area. A 3D ovoid is given in the xyz Cartesian system by where 19
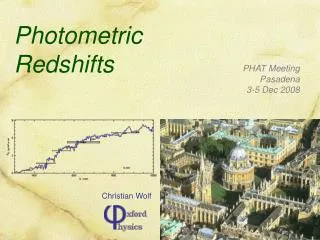
The Effect of Diffuse Light on PS Reconstruction • PS requires the subject to be illuminated in turn by directional light sources. • The ambient light component that is present constitutes a degrading factor that reduces the directionality of the intended directional component. • Objectives: • Assess the PS robustness with respect to the ratio of ambient to directional illuminance. • Find the illuminance ratio where reconstruction is no longer informative of the actual surface.
The Effect of Diffuse Light on PS Reconstruction: Experimental Setup • Floodlight connected to a dimmer provides uniform ambient illumination of varying illuminance. • Light-/Flash-meter used to measure both ambient and directional components.
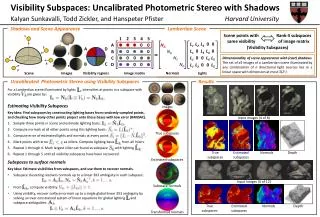
λ=9 λ=11 The Effect of Diffuse Light on PS Reconstruction
Conclusions • The proposed uncalibrated flatfielding technique is general-purpose and renders similar reconstruction results as its calibrated counterpart. • The proposed uncalibrated light estimation technique is a practical approach that targets the human face class. • The above techniques enable autonomous and reliable surface reconstruction for challenging real-world applications, such as the on-line capturing of human faces. • In the presence of ambient light, PS reconstruction quality decreases linearly as the illuminance ratio of the diffuse to the directional light component increases. PS provides informative outputs for illuminance ratios as high as λ=9.