Download
1 / 26
260 likes | 561 Views
Elaboração de Relatórios Obtenção de modelo experimental para motor cc. Laboratório de Sistemas de Controle Glaucia M. Bressan. Capa. Unidade em que estuda Título do relatório Identificação dos autores Turma e data Disciplina e professora. Sumário.

E N D
Elaboração de RelatóriosObtenção de modelo experimental para motor cc Laboratório de Sistemas de Controle Glaucia M. Bressan
Capa • Unidade em que estuda • Título do relatório • Identificação dos autores • Turma e data • Disciplina e professora
Sumário Relacionar títulos das seções para fácil acesso • Numerar seções e subseções • Numerar páginas do texto • Figuras e tabelas devem ser citadas no texto e numeradas • Gráficos com fundo branco • Apêndice segue outra numeração diferente da numeração das seções • Bibliografia deve ser adicionada no final em seção sem numeração
Resumo Apresentar o conteúdo do relatório em um só parágrafo sem numeração • O que o relatório apresenta • Técnicas utilizadas • Exemplo Este relatório apresenta os resultados obtidos para os parâmetros de um motor cc a partir da resposta a um degrau de tensão aplicado na armadura. Os diversos ensaios realizados para obter a resposta ao degrau, o ganho do amplificador de potência, o ganho do tacogerador são descritos. O modelo para o motor cc encontrado bem como os gráficos para comparação das resposta do modelo com a resposta experimental são apresentadas.
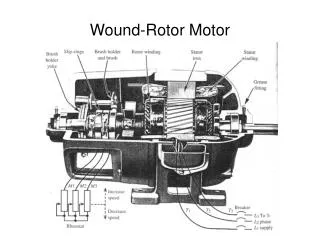
1. Introdução Apresentar o conteúdo e organização do relatório • Contextualizar o tema tratado introduzindo os motores de cc, suas equações e o diagrama de bloco (entrada Va e saída w) • Relacionar os equipamentos e ferramentas utilizadas: multímetro digital, motor cc, osciloscópio digital, programas Origin,Matlab e Labview
1. Introdução (Cont.) Apresentar equações e diagrama de blocos do motor cc, p. exemplo: Figura 1: Representação do modelo linear completo para o motor CC.
2. Ensaios Obtenção de parâmetros do conjunto motor/tacogerador Descrever os ensaios realizados • 2.1 Determinação de Ktg • Descrever o procedimento utilizado com um encoder óptico de 1024 linhas • vtg(t) = ktg* ω(t) • Indicar tabela, gráfico e valor obtido Figura 2: w versus Vtg para obter Ktg.
2. Ensaios (Cont.) • 2.2 Obtenção do modelo do motor CC Descrever o ensaio ao degrau realizado Obtenção via Labview de pontos da resposta w(t) do repouso ao regime para determinar a função de transferência do motor • Obtenção da resposta de corrente para visualizar a sua forma Figura 3: Respostas ao degrau de velocidade (acima) e corrente (abaixo).
2.3 Simulações das respostas Apresentar as respostas de velocidade a uma entrada degrau • Apresentar o diagrama, as respostas de velocidade e as funções de transferência: 1a. e 2a. ordem • Apresentar os polos do motor cc Figura 5: Diagrama de simulação para os dois modelos.
2.3 Simulações (Cont.) • Representação espaço de estado (2a. ordem) • Resposta de velocidade • Experimental versus resposta do modelo obtido Figura 6: Respostas de velocidade comparadas.
2. Ensaios (Cont.) • 2.4 Obtenção do ganho amplificador de potência • Indicar duty cicle: • Indicar diagrama do amplificador de potencia Figura 4: Amplificador chopper PWM.
3. Conclusões • Comentar sobre os experimentos realizados • Discutir os resultados via função de transferência ou via resposta no tempo
Apêndice • Suportes explicativos e ilustrativos para consulta colocados antes das referencias bibliográficas • Informações não essenciais para compreensão dos experimentos, mas, complementares • Procedimentos • Deduções teóricas • Rotinas do Matlab
Apendice ADados ensaio tensão % Preparação dos dados do ensaio de tensao do motor ELETROCRAFT close all;clear all load matheusME.dat % tempo de amostragem(delta t): 1/3000 t=(0:1/3000:(0.2-1/3000)); % vetor corrente em Amperes i= matheusME(:,1)*3*2; % vetor velocidade em rad/s ktg = 0.153; vtg=matheusME(:,2)*2*(19.58/9.1); w = vtg/ktg; figure (1) subplot(3,1,1), plot(t,w) xlabel('Tempo(s)'); ylabel('w[rad/s]') subplot(3,1,3), plot(t,i); xlabel('Tempo(s)'); ylabel('I[A]') subplot(3,1,2), plot(t,vtg); xlabel('Tempo(s)');ylabel('Vtg[V]') t=t'; x=[t w] save dados.dat -ascii x
Apendice BUso da interface ident clear all;close all;clc; load dados.dat; t = dados(:,1); % tempo (s) w = dados(:,2); % velocidade angular (rad/s) Ts = 1/3000 ; %taxa de amostragem %defining object: motor motor = iddata; motor.Tstart = 0; motor.Ts = Ts; motor.InputData = 12*ones(size(t)); motor.OutputData = w; % chamar a interface gráfica ident % importar dados via objeto definido acima como 'motor' % escolher modelo de processos e executar o comando 'Estimate' % salvar a seção: motorid.sid % pode-se chamar a interface gráfica a partir de uma seção salva % aqui chamada 'motorid.sid' da seguinte forma: ident('motorid.sid')
Apendice CAnálise do ruído • Pode-se estimar o ruído da saída do tacogerador a partir de uma análise espectral do sinal medido. Selecionar um intervalo da saída após o transitório, seja t em [0.2s 0.4s], e calcular o valor médio do sinal no intervalo usando: • novosinal=sinal-mean(sinal); • e obter a transformada de Fourier discreta do sinal subtraído da média usando • L = size(t,1); NFFT = 2^nextpow2(L); • %NFFT dá o número de pontos a ser usado para calcular a transformada de Fourier discreta (fft) e nextpow2 dá a menor potencia de 2 que é maior ou igual a L usada para determinar o numero de pontos para calcular a DFT ; • y = fft(novosinal,NFFT); • %O espectro de potência é dado por • Pyy=y*conj(y)/NFFT; • %Para plotar o espectro de potência do novosinal, obter o vetor de freqüências • f = 1/ts*(0:NFFT/2-1)/NFFT;\% em que ts é o período de amostragem • e usar o comando • plot(f(1:NFFT/2),Pyy(1:NFFT/2) • ,Pyy(1:NFFT/2)),'r-','LineWidth',2) • %No espectro, obter a freqüência fundamental. Este sinal senoidal juntamente com um sinal aleatório é o ruído a ser adicionado na saída do tacogerador: • [m i]=max(Pyy); • sinalruido=sin(2*pi*f(i))+sqrt(var(novosinal))*randn(L,1);
Referências bibliográficas • Relacionar no final do relatório as publicações consultadas para elaboração do relatório • Devem ser citadas no texto • Sobrenome, iniciais do nome, título, volume, editora, local, ano • Exemplo: [1] Ogata, K., “Modern Control Engeneering,” Prentice-Hall International, Inc. 2a. Edição, Englewood Cliffs, N.J., 1990.
Resumo Apresentação do relatório • O que o relatório apresenta • Técnicas de medida Este relatório tem por objetivo estudar o sistema de suspensão magnética caracterizando seus componentes. Os experimentos visam determinar características como ponto de equilíbrio do sistema, ganho do sensor de posição, resistência e indutância da bobina. Estes parâmetros compõem os modelos utilizados na análise do sistema e são indispensáveis para implementação de um sistema de controle eficiente.
1. Introdução Introduzir o conteúdo e organização do relatório • Contextualizar o assunto, em visão geral • Introduzir as equações do sistema de suspensão • Equipamentos e componentes • Bobina, sensor óptico e emissor, sensores de posição e de corrente, computador e programas utilizados
2. Identificação dos parâmetros Descrever os ensaios realizados • 2.1 Resistência da bobina usando um Ohmímetro Figura 1: Ohmímetro. • Exibir o valor obtido e tabela
2.2. Ganho do sensor de posição Exibir resultado em função da posição da esfera Figura 2: Curva característica do sensor de posição linearizada em torno do ponto de equilíbrio.
2.3 Indutância da bobina La Indicar circuito utilizado para a determinação da indutância Figura 3: Circuito utilizado para a determinação da indutância da bobina. Conhecendo t, Rext e Rbobina, determinar La e Vext/Rext
2.4. Determinação de a, Lo, k1, k2 Descrever procedimentos e equacionamentos utilizados e exibir tabelas, p. exemplo, as constantes a e L0 são obtidas a partir de:
2.5. Função de transferência em malha aberta Exibir o diagramam função de transferência e os pólos Figura 4: Diagrama de simulação do sistema de suspensão magnética em malha aberta.
3. Conclusão Discutir os resultados obtidos e tecer comentários sobre os experimentos Apêndice A Apresentar detalhes dos programas usados • Subrotina do Matlab - Obtenção da função de transferência do sistema linearizado e de seus pólos