Download
1 / 1
10 likes | 138 Views
We propose a novel micro-robotic actuator system, called Starbug, designed for precise positioning of payloads such as pick-off mirrors and integral field units on telescope focal planes. This system allows for quick configuration, operating with a field configuration time under ten minutes, facilitating effective observation time. Starbugs can move simultaneously and are capable of maintaining positioning accuracy within ten microns. The technology is scalable, suitable for cryogenic environments, and represents a significant advancement in robotic positioning systems tailored for modern astronomical telescopes.

E N D
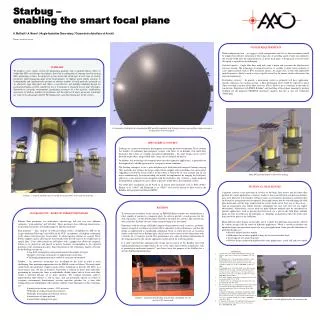
A micro-robotic actuator carrying a single fibre A 2-m diameter field plate for a hypothetical ELT, partially populated with Starbug actuators carrying fibres from retractors at the perimeter of the focal plane. Kickbot – a demonstration Starbug actuator fully controllable for 2-D motion at 0.5 mm/second. Mini-IFU payload shaped to allow close packing. Starbug – a range of payloads may be carried by roving robots of the same basic design. Starbug – enabling the smart focal plane A. McGrath*a,A. Mooreb (aAnglo-Australian Observatory, bOsservatorio Astrofisico di Arcetri) *E-mail: ajm@aao.gov.au SYSTEM REQUIREMENTS Field configuration time – we suggest a field configuration time of less than ten minutes would be required for effective utilization of observing time. A travelling speed of only one millimeter per second would meet the requirement for a 1-metre focal plane. A design goal of several times this speed is regarded as unchallenging. Payload capacity – Single fibre bugs need only carry a prism and overcome the fibre/services retractor tension. The technology envisioned, however, is scalable to allow larger actuators to carry larger payloads such as IFUs or pickoff mirrors. An image relay system with deployable pickoff mirrors is likely to need to carry a tip-tilt control for the mirror, which will increase the payload requirement. Positioning accuracy – In general, a positioning system as proposed will have application-specific tolerances. In existing systems, a fibre positioning robot would be expected to place fibres to within a fraction of the fibre core size. This is likely to give a tolerance in the order of ten microns. Experience with FMOS-Echidna7, and modeling of focal plane imaging for position feedback for the proposed MOMFOS positioner8 suggests that this is also not technically challenging. SUMMARY We propose a new robotic system for positioning payloads such as pickoff mirrors, fibres or deployable IFUs on telescope focal planes. Based on a combination of concepts used in existing fibre positioning systems, the proposed system retains the advantages of each type of existing positioner, while eliminating many of the disadvantages. It employs micro-robotic actuators to independently and simultaneously position an arbitrary number of small payloads accurately on an arbitrarily large field plate and offers a cost-effective and multiply-redundant design for payload positioning systems suitable for use at Cassegrain or Nasmyth foci of large telescopes. Operation in cryogenic environments, positioning accuracies of a few microns, simultaneous movement of arbitrary numbers of positioners and the removal of many movement constraints are some of the advantages offered. We demonstrate a prototype positioner for the system. THE STARBUG CONCEPT Starbugs are a natural evolutionary development of existing positioner technology. They combine the benefits of traditional pick-and-place systems with those of an Echidna style multi-fibre positioner. The robots are scalable and payload independent – the same design can be used to position single fibres, integral field units, image slicers and pick-off mirrors. In addition, this technology development opens up other important applications, in particular the development of a reliable positioner for cryogenic/vacuum conditions. The Starbug concept is to use a pick-and-place-style field plate with magnetic buttons carrying fibre payloads, but replaces the large, single robotic gripper with an Echidna-style micro-robot supporting each button. Each of these roving robots is moved by its own actuator and all can move simultaneously. Position encoding can readily be implemented by imaging the field plate, and/or by a non-optical system integrated with the field plate. Fig. 4 shows a single proposed Starbug button configured to carry a fibre as part of a multi-object spectrographic system. The robot drive mechanism can be based on an inertial drive positioner such as Pohl (1986)4, Renner et al. (1989)5 and Blackford et al. (1991)6, and closely related to those used in the Echidna fibre positioner of Subaru-FMOS7. • TECHNICAL CHALLENGES • A primary concern is the provision of services to the bugs; their power and the fibres they position. For some applications, retractors similar to those used for pick-and-place positioners may serve. However if the number of bugs is large, or if cryogenic operation is mandated, then an alternative arrangement may be required. Some applications may be served keeping the field plate horizontal, and the bugs simply push the service feeds out of their way as they move – such an arrangement may require periodic ‘untangling’ but may well serve for one night’s observations. Alternatively, service feeds via quite different methods may be considered for specific applications, such as proving electrical feeds via a grid on the field plate, multiple points of entry for feeds into the field plate, or ‘dangling’ arrangements where the feeds come from out of the plane of the field plate. • Many different robot designs are possible, and it is likely that differing characteristics offered by various designs will be suited to different applications. Work is needed to produce the optimum design and excitation signals for any given application. Some possible limitations of particular designs are: • ·Possible limited speed of motion • ·Difficulties due to forces applied to bugs by electrical and fibre feeds • ·Load capacity of various bug types • ·Need to design a payload manipulator for some applications – pitch, roll and yaw control KICKBOT To demonstrate feasibility of the concept, an FMOS-Echidna actuator was modified into a robot capable of motion on a magnetic plate. In order to provide a reaction mass for the stick-slip action7, a 6-mm ball bearing is bonded to the top of the actuator. This actuator has been called the ‘Kickbot’ because of the action resulting in its movement. Experience with the design of Echidna suggests that parameters such as masses, geometry, magnet strength or excitation waveform will be important to the performance, and that the design as implemented is considerably suboptimal. Even so, when driven by an excitation similar to that used for an Echidna spine, this actuator can be moved in two dimensions with a velocity of ~0.5 mm per second. This performance was achieved without optimization of the design parameters but already approaches useful speeds for a fibre positioner. It is fully expected that optimizing the design and excitation of the Kickbot will yield significant performance improvement. In any event, other micro-robotic technologies such as piezoelectric inchworm actuators17 may better serve the purpose of the Kickbot for a specific Starbug implementation. • BACKGROUND – ROBOTIC FIBRE POSITIONERS • Robotic fibre positioners for multi-object spectroscopy fall into two very different categories, ‘pick-and-place’ and ‘Echidna’. These positioners have differing characteristics giving them advantages and disadvantages in differing situations. • Pick-and-place – This category of fibre-positioning robots, exemplified by 2dF on the Anglo-Australian Telescope1 and OzPoz on the VLT2, incorporates a field plate conforming to the shape of the telescope’s focal surface, to which magnetic buttons are secured. These buttons support a prism allowing the focused light from the telescope to be coupled into an optical fibre. 2-axis robot patrols the field plate with a gripper that allows the magnetic buttons to be picked up and placed in precise locations corresponding to the expected positions of the astronomical targets. Some limitations of this technology, largely overcome by the Starbug concept, are: • Long field configuration times proportional to the number of targets • Requires very large mechanisms to support large focal planes • Challenging implementation in cooled or cryogenic environment • Echidna – An innovative technology was developed by the AAO in order to meet challenging fibre positioner requirements for the FMOS system on Subaru3. Presently under construction, this positioner employs micro-robotic technology to provide 400 fibres in a focal surface only 150 mm in diameter. It provides a solution to dense field multi-fibre positioning by carrying the fibres in individually tiltable spines able to locate each fibre within a specified distance of its home position. The resultant positioner achieves unprecedented fibre density, is low in mass, and can potentially operate in cooled or cryogenic environments Simultaneous actuator operation provides for a short field configuration time independent of the number of fibres. Some limitations of this technology are: • Limited to fast beam systems (~f/2.5 or faster) • Difficulty in scaling to large focal surfaces • Difficulty in matching curved focal surfaces • Limited mass of spine payload • Limited field configuration space REFERENCES 1. I. Lewis et al., “The Anglo-Australian Observatory’s 2dF facility”, Mon. Not. R. Astron. Soc. 333 issue 2, 279-299, 2002 2. P. Gillingham et al., “The performance of OzPoz, a multi-fiber positioner on the VLT”, Instrument Design and Performance for Optica/Infrared Ground-based Telescopes, ed. M.Iye & A.Moorwood, Proc. SPIE 4841, 1170-1179, 2003 3. P. Gillingham et al., “The Fiber Multi-object Spectrograph (FMOS) Project: the Anglo-Australian Observatory role”, Instrument Design and Performance for Optica/Infrared Ground-based Telescopes, ed. M.Iye & A.Moorwood, Proc. SPIE 4841, 985-996, 2003 4. D.W. Pohl, “Dynamic piezoelectric translation devices”, Rev. Sci. Instrum. 58(1), 54-57, 1986 5. C. Renner et al., “A vertical piezoelectric slider”, Rev. Sci. Instrum. 61(3), 965-967, 1990 6. B.L. Blackford et al., “A vertical/horizontal two-dimensional piezoelectric driven inertial slider micropositioner for cryogenic applications”, Rev. Sci. Instrum. 63(4), 2206–2209, 1991 7. A. Moore, P. Gillingham, J.Griesbach, M.Akiyama, “Spine development for the Echidna fiber positioner”, Instrument Design and Performance for Optica/Infrared Ground-based Telescopes, ed. M.Iye & A.Moorwood, Proc. SPIE 4841, 1429-1439, 2003 9. A. Moore & A. McGrath “The MOMFOS fiber positioner”, Instrumentation for Future Extremely Large Telescopes, Proc. SPIE 5492-206, 2004 Deployable, steerable pickoff mirror for an image relay