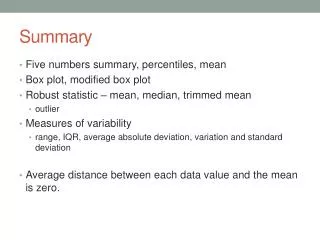
Summary
180 likes | 340 Views
Summary. SECTION 1: Comparison between settings with different value of residual DeltaVs SECTION 2: Comparison between a Ka configuration and a putative X-Ka configuration SECTION 3: Preliminary analysis of the impact of the accelerometer noise in the estimation of the gravity field.

Summary
E N D
Presentation Transcript
Summary • SECTION 1: Comparison between settings with different value of residual DeltaVs • SECTION 2: Comparison between a Ka configuration and a putative X-Ka configuration • SECTION 3: Preliminary analysis of the impact of the accelerometer noise in the estimation of the gravity field MORE Progress Meeting – October 2009
SECTION 1 - Configurations DSM 2 DSM 1 DSM 2 DSM 1 • General setup: • - 88 arcs each lasting 24 hours • Gravitational field up to the degree 30 • The onboard accelerometer allows a complete knowledge of non-gravitational accelerations, therefore they are not included in the model • - WGN Allan deviation = 10-14 @ 1000s EOT EOT BOT BOT Ka Ka Ka Ka 24h 0h 24h 0h EOT EOT BOT BOT MORE Progress Meeting – October 2009
SECTION 1 - Cases MORE Progress Meeting – October 2009
SECTION 1 - Multiarc estimate Case A Case B Case C Case D MORE Progress Meeting – October 2009
SECTION 2 - Configurations DSM 2 DSM 2 DSM 1 DSM 1 • General setup: • - 88 arcs each lasting 24 hours • Gravitational field up to the degree 30 • The onboard accelerometer allows a complete knowledge of non-gravitational accelerations, therefore they are not included in the model • - WGN Allan deviation = 10-14 @ 1000s EOT EOT EOT EOT BOT BOT BOT BOT Ka Ka Ka Ka X X 24h 24h 0h 0h MORE Progress Meeting – October 2009
SECTION 2 - Cases MORE Progress Meeting – October 2009
SECTION 2 - Multiarc estimate Case A Case B Case C Case D MORE Progress Meeting – October 2009
Case A – Ellipsoid and Geoid MORE Progress Meeting – October 2009
Case A – Second iteration Corrected value of coefficients of gravity field Multiarc estimate Associated formal uncertainties Nominal value of coefficients of gravity field Multiarc estimate Second iteration A priori formal uncertainties MORE Progress Meeting – October 2009
Case A – Second iteration - Results km (log) km/s (log) MORE Progress Meeting – October 2009
SECTION 3 - Accelerometer noise From “Gravity field and rotation state of Mercury from the BepiColombo Radio Science Experiments”, Milani et al., 2001 MORE Progress Meeting – October 2009
Periodic acceleration (ODP model) Let r and v denote the spacecraft position and velocity θ denote the angle from the ascending node of the spacecraft orbit on the planet equatorial plane to the spacecraft: where: MORE Progress Meeting – October 2009
Periodic acceleration - Settings MORE Progress Meeting – October 2009
Multiarc estimate MORE Progress Meeting – October 2009
Conclusions - In a Ka configuration, the gravity field is correctly recovered if residual DeltaVs of 0.15mm/s are considered. On the other hand, if the residual DeltaVs of 1mm/s are considered, it is necessary to include the impulsive burns in the solve-for parameters, but estimation errors larger than 3 sigma occur for degree higher than 18. Impulsive maneuvers of 1mm/s, not included in the solve-for parameter, jeopardize the recovering of the gravity field. - If an additional X band ground station is available, the gravity field can be correctly estimated also if residual DeltaVs of 1mm/s are considered. - The current Ka configuration with residual DeltaVs of 1mm/s (case A) shows error of few centimeters in the geoid radius (considering a gravity field up to degree 10) and will allow, at the end of the mission, to reconstruct the trajectory with accuracies compliant with altimeter requirements. - The preliminary analysis of the accelerometer noise provide information about a possible worsening of the estimation of the gravity field and make necessary an in-depth study of the impact of accelerometer noise and residual DeltaVs. MORE Progress Meeting – October 2009
Case A – Ellipsoid and Geoid MORE Progress Meeting – October 2009