Download
1 / 18
180 likes | 335 Views
Space Technology 7 (ST-7) Concept Study. ST-7 Concept Study. Objectives: Demonstrate model-based autonomy on real-world missions. Demonstrate additional model-based capabilities not deployed on DS-1: Model-based Planning Model-based Sequencing Multi-step Reconfigurations

E N D
ST-7 Concept Study • Objectives: • Demonstrate model-based autonomy on real-world missions. • Demonstrate additional model-based capabilities not deployed onDS-1: • Model-based Planning • Model-based Sequencing • Multi-step Reconfigurations • Approach: Integrate Kirk and Titan technology into ST-7 • Space Technology 7: proposed NASA New Millennium mission to validate s/w & h/w technologies for autonomous operation.
New Millennium ST-7Autonomy Mission Concept • Autonomy one of 4 competing technologies. • 6-month concept definition phase ended January 2002. • Autonomy-ready s/c design based on primarily off-the-shelf components. • Mission design highlighting: • Onboard execution of activities normally commanded from ground; • Science-driven execution; • Software testbed demonstration.
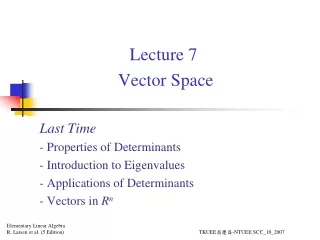
System-level Planner Engineering-level Commanding & Fault Prot. Other subsystems Autonomous ACS Autonomous Science Exec h/w h/w instruments h/w h/w Software Demonstrations of ST-7 Scenarios Demonstrate Titan and Kirk in the context of a simulated mission scenario, with realistic h/w models. Kirk: System-level Science Observation and Downlink Scenario • Model-based Planning • Planner/Executive Interaction (“Plan Running”) Titan: Engineering-level Downlink Data Block Activity • Model-based Sequencing • Mode Estimation and Mode Reconfiguration
non-deterministic choice • time bound satisfaction [5,7] • symbolic constraint specification • activities executed at the model-based execution layer [35,55] Constraint: pos B [35,55] Constraint: pos A [5,10] [5,10] [10,20] Constraint: comm window open Science Observation and Downlink Diagram KIRK Features: STARTPerform observation A? Reorient s/c to B no yes Perform obs A,prepare data Perform obs B,prepare data Is s/c pos B? Use Omni A? no No, use omni B yes Reorient s/c to A Reorient s/c to B Is s/c pos A? no yes yes Replan Downlink data block success END
System-level Planner Engineering-level Commanding & Fault Prot. Other subsystems Autonomous ACS Autonomous Science Exec h/w h/w instruments h/w h/w Software Demonstrations of ST-7 Scenarios Demonstrate Titan and Kirk in the context of a simulated mission scenario, with realistic h/w models. Kirk: System-level Science Observation and Downlink Scenario • Model-based Planning • Planner/Executive Interaction (“Plan Running”) Titan: Engineering-level Downlink Data Block Activity • Model-based Sequencing • Mode Estimation and Mode Reconfiguration
Downlink Data Block Activity Objective: downlink a block of data from onboard storage to a specified ground station
Downlink Data Block Component Models start-streaming IDLE STREAMING- RT-TELEM go-idle start- downlinking stop- downlinking go-idle UNKNOWN DOWNLINKING-DATA
Downlink Data Block Component Models STUCK-AT-A ENABLE-OMNIA STUCK-AT-B selectB selectA ENABLE-OMNIB UNKNOWN
Downlink Data Block Sequence - Initial State • omniA in view of ground station • no ground command received • omniA in nominal mode (remains so throughout) • omniB in nominal mode (remains so throughout) • transmitter in idle mode • switch set to enable omniB enable-omniB idle
Downlink Data Block Sequence • Set switch to enable appropriate omnidirectional antenna for downlink of streaming real-time telemetry (based on omni-in-view info from ACS). set to mode: enable-omniA idle
Downlink Data Block Sequence • Set switch to enable appropriate omnidirectional antenna for downlink of streaming real-time telemetry (based on omni-in-view info from ACS). • If switch gets stuck in wrong position, fail DownlinkDataBlock activity. fail when mode: stuck-at-B idle
Downlink Data Block Sequence • Set switch to enable appropriate omnidirectional antenna for downlink of streaming real-time telemetry (based on omni-in-view info from ACS). • If switch gets stuck in wrong position, fail DownlinkDataBlock activity. • Otherwise, set transmitter to start streaming real-time telemetry so that ground can establish communication link. set to mode: streaming-rt-telem enable-omniA
Downlink Data Block Sequence • Set switch to enable appropriate omnidirectional antenna for downlink of streaming real-time telemetry (based on omni-in-view info from ACS). • If switch gets stuck in wrong position, fail DownlinkDataBlock activity. • Otherwise, set transmitter to start streaming real-time telemetry so that ground can establish communication link. streaming-rt-telem enable-omniA
Downlink Data Block Sequence • Set switch to enable appropriate omnidirectional antenna for downlink of streaming real-time telemetry (based on omni-in-view info from ACS). • If switch gets stuck in wrong position, fail DownlinkDataBlock activity. • Otherwise, set transmitter to start streaming real-time telemetry so that ground can establish communication link. • When start-playback command received from ground, start downlinking data from onboard storage. set to mode: downlinking-data enable-omniA
Downlink Data Block Sequence • Set switch to enable appropriate omnidirectional antenna for downlink of streaming real-time telemetry (based on omni-in-view info from ACS). • If switch gets stuck in wrong position, fail DownlinkDataBlock activity. • Otherwise, set transmitter to start streaming real-time telemetry so that ground can establish communication link. • When start-playback command received from ground, start downlinking data from onboard storage. downlinking-data enable-omniA
Downlink Data Block Sequence • Set switch to enable appropriate omnidirectional antenna for downlink of streaming real-time telemetry (based on omni-in-view info from ACS). • If switch gets stuck in wrong position, fail DownlinkDataBlock activity. • Otherwise, set transmitter to start streaming real-time telemetry so that ground can establish communication link. • When start-playback command received from ground, start downlinking data from onboard storage. • When downlink finished, idle transmitter and report success of DownlinkDataBlock activity. set to mode: idle enable-omniA
Titan Demonstration Control Program Plant Models HELIOS Plant Model Visualization Titan Java Display C++ Engine Activity from Plan Runner Export • Mode estimates • Configuration goals • Issued commands