Download
1 / 42
420 likes | 436 Views
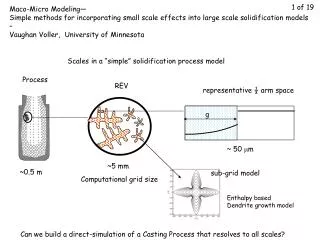
Solving Multistage Stochastic Linear Programs on the Computational Grid. Jerry Shen. June 8, 2004. Stochastic Programming (SP). Random Uncertainty Problems with limited information Can it really help me to win money in stock market?

E N D
Solving Multistage Stochastic Linear Programs on the Computational Grid Jerry Shen June 8, 2004
Stochastic Programming (SP) • Random • Uncertainty • Problems with limited information • Can it really help me to win money in stock market? • I remember I have taken IE 495 last year … really, what is it? • Who cares? I don’t!
My Answer • It is hard but important. Since it is going to be a topic in my thesis!
First Answer in Google … • SP is a framework for modeling optimization problems that involve uncertainty.
Two-Stage SP with Recourse Where : Expected recourse cost of choosing x in first stage
L-Shaped Method • Solve first-stage (root) node • Get a proposal solution x, and pass it to children • Solve second-stage (children) nodes • Evaluate recourse cost Q(x) • Generate (feasibility & optimality) cuts and add to root node • Repeat
Multi-Stage SP with Recourse Where : Expected recourse cost of choosing x0 in first stage
Nested Decomposition Method • A recursive version of the L-Shaped Method • Node n generates a proposal solution xn, and pass it to his children S(n) … and children’s to grandchildren • Cuts generated and passed back to parent and evaluate for Qt(xp(n))
Multi-Stage = Multi Two-Stage?? • Not That Easy!! • In Two-Stage, a node is either a parent or a child. • In Multi-Stage, a node is a parent, a child or both. (RYG Method) • Scenario tree blow-up problem • Imaging there are 10 independent variables with 1000 scenarios per variable … in 5 stages, the number of total scenarios at last stage will be 1016
How to deal with the computation? • Having a super efficient algorithm, being a super smart guy. • Having a very fast computer with huge memory. • Having lots of machines working together with by using smart methods. Mom said: “You are not and will never be God” I am not a millionaire Grid Computing!!
The Computational Grid • It is like the national power grid • Users can seamlessly draw computational power whenever they need it • Possible? • A lots of computational resources are wasted in the internet, they can be brought together to solve very large problems • Difficulties • Security • Interfaces • Heterogeneity • Dynamic • Communication
Tools for Grid Computing • Condor • http://www.cs.wisc.edu/condor • Manages collections of “distributively owned” workstations. It is a pool. • It is good at • Solving lots of independent tasks like Monte Carlo Methods • It is not good at • Parallel Applications with non-trivial control structures like optimization algorithms
Tools for Grid Computing • MW • http://www.cs.wisc.edu/condor/mw • Master-Worker Paradigm. • Master assigns tasks to the workers • Workers perform tasks and report results to master • Workers do not communicate with each other • MW - SMART • A nested-decomposition code for multistage stochastic linear programming
SMART • SmartMaster • Sending out works (LPs), if no more works, job is done! • SmartTask • Keep record, pack and unpack tasks (works or results) • SmartWorker • Accept works, solving it and report results. • Controller • Create scenario tree, record the node state, telling SmartMaster what tasks to send next. • CutManager • Keep records of all cuts, store them by stages.
Tasks • Task type: • Work – One or more nodes in same period with proposals from parents. • Result – Proposals for children or cuts for parents. • Direction: • Forward – Given the proposals from parents, find out the proposals for the children, or a feasibility cuts for parents. (not for last stage) • Backward – Given the proposals and model values from parents, find out the optimality cuts for parents, if there is any. • Forward Result will be stored in the task nodes itself • Backward Result will be stored in the parent node
Node State • Color & Direction: • Red (R) – Node n is blocked. (Nothing useful can be gained by evaluating this node) • Yellow Forward (YF) – Node n is ready to be evaluated in a forward work • Yellow Backward (YB) – Node n is ready to be evaluated in a backward work • Green Forward (GF) – Node n is being evaluated in a forward work and is waiting for the forward result • Green Backward (GB) – Node n is being evaluated in a backward work or is waiting for the backward result
Node State • Latest Task ID • ID of the latest task that evaluating the node n • Number of Children Reported • How many children has finished the work and report in backward results • Number of Cuts Reported • How many new cuts has been reported in backward results during the time parent is waiting
T0 done! Root node solved the forward work and get x01. Now, it is waiting to hear from his children Children are ready for forward works. F B F X01 F
x01 T1 Nodes in stage 1 are evaluated in forward works. F B F x01 T2 F
F T1 done B F F F B B F F T2 F
x11 T3 F Going on … … What happen if T2 infeasible? B F x11 T4 F x11 T5 F B B F x11 T6 F x01 T2 F
x11 T3 “I don’t like the proposal, give me another!” x11 T4 x11 T5 F x11 T6
x11 T3 T4 Done! No mater what the result is, it can not change the node states any more x11 T5 F x11 T6
x11 T11 F Start a new iteration B F x11 T12 What happen if … T5 Done? T12 never returns? T14 infeasible? . . . F x11 T5 & T13 F B B F x11 T6 & T14 F x02 T10 F
Controller RYG Method 1 RegisterTaskCompletion(Task t) 1: if t.way == Forward then 2: for all nodes n in t.givenX do 3: if n.ContainInfeasiblityCut then 4: Store the cut in CutManager, store the cut index in nodeinfo[t-1,n] 5: if n.color == GB && n.latestID ≤ t.ID then 6: n.color ← YB (YF if t.stage == 2 //n is root) 7: end if 8: for all nodes m in Descendants(n) do 9: m.color ← R 10: end for 11: else 12: for all nodes m in t with the same parent do 13: if m.color == GF && m.latestID ≤ t.ID then 14: Store proposals 15: m.color ← GB 16: S(m).color ← YF (YB if t.stage == T-1 //S(m) is at last stage) 17: end if 18: end for 19: end if 20: update n.numCutReported 21: end for
Controller RYG Method 1 (Cont.) RegisterTaskCompletion(Task t) 22: else if t.way == Backward then 23: for all nodes n in t.givenX do 24: if n.ContainInfeasiblityCut then 25: Store the cut in CutManager, store the cut index in nodeinfo[t-1,n] 26: if n.color == GB && n.latestID ≤ t.ID then 27: n.color ← YB (YF if t.stage == 2 //n is root) 28: end if 29: for all nodes m in Descendants(n) do 30: m.color ← R 31: end for 32: else 33: for all nodes m in t with the same parent do 34: if m.color == GB && m.latestID ≤ t.ID then 35: m.color ← R 36: P(m).numChildReported ++ 37: end if 38: end for 39: end if 40: update n.numCutReported
Controller RYG Method 1 (Cont.) RegisterTaskCompletion(Task t) 41: if n.color == GB && n.latestID ≤ t.ID then 42: if (n.numChildReported / n.numChildren ≥ 1 && n.numCutReported / n.numPossibleCut ≥ 2) || (n.numChildReported / n.numChildren == 1 && n.numCutReported ≥ 1) then 43: n.color ← YB (YF if t.stage == 2 //n is root) 44: else if n.numChildReported / n.numChildren == 1 && n.numCutReported == 0 then 45: n.color ← YB (R if t.stage == 2 //n is root) 46: end if 47: end if 48: end for 49: end if
Controller RYG Method 2 AnalyzeTreeStatus(Period t, LatestId ID) 1: if t == 0 then 2: if all nodes n in tree . color == R then Algorithm Terminate 3: else if root.color == YF then 4: Create root task with cuts stored in root node, root.color ← GF 5: Update root node.LatestID 6: end if 7: else 8: for all nodes n in t do 9: if n.color == YF then push n into ReadyForForwardTaskList 10: end if 11: end for 12: if ReadyForForwardTaskList.num > 3 then 13: Create forward tasks, nodes.color ← GF 14: Update latestID for nodes in tasks 15: end if 16: for all clusters i in t do 17: if all node n in cluster i . color == YB then push i into ReadyForBackwardTaskList 18: end if 19: if ReadyForBackwardTaskList.num > 4 then 20: Create backward tasks, nodes.color ← GB 21: Update latestID for nodes 22: end if 23: end if
Is the code working? • Solves small Multi-Stage SP testing problem in a single processor. • Working fine while going from single to multiprocessor. • The parallel efficiency is terrible.
Testing in Beowulf (Parallel) • 21:11:58 Number of (different) workers: 64 • 21:11:58 Wall clock time for this job: 291.6457 • 21:11:58 Total time workers were alive (up): 11564.4345 • 21:11:58 Total wall clock time of workers: 49.9986 • 21:11:58 Total cpu time used by all workers: 47.8942 • 21:11:58 Total time workers were suspended: 0.0000 • 21:11:58 Averaged benchmark factor : 0.0000 • 21:11:58 Equivalent benchmark factor : 0.0000 • 21:11:58 Minimum benchmark factor : 0.0000 • 21:11:58 Maximum benchmark factor : 0.0000 • 21:11:58 Average Number Present Workers : 39.6523 • 21:11:58 Average Number NonSuspended Workers : 39.6523 • 21:11:58 Average Number Active Workers : 0.1642 • 21:11:58 Equivalent Pool Performance : 0.0000 • 21:11:58 Equivalent Run Time : 0.0000 • 21:11:58 Overall Parallel Performance : 0.0043 • 21:11:58 Total Number of benchmark tasks : 0
What is the problem? • Tasks are not big enough, most times workers are wasting time in communicating with master rather then actually doing the computational job. • Master is too busy and not assigning the tasks smart enough.
Current working or ideas • Aggregation of nodes • At some stage, the nodes start to swallow his descendants and become big “families” – large deterministic equivalents • Making the size of tasks reasonable • Reducing the number of cuts necessary
Current working or ideas • Node/Task Sequencing • Speed up the algorithm • Solve problem in two phases • First, we randomly pick up some path (or sub-trees) through scenario tree to get some useful cuts • Then, do a Fast Forward Fast Backward
Current working or ideas • Intelligent tasking strategy • Decide a reasonable number of nodes (in a forward task) or clusters (in a backward task) • Should be a dynamic strategy • Things might be considered in the strategy: different stages, number of workers at the time being, number of available nodes at the time being
Current working or ideas • Intelligent clustering strategy • Decide a reasonable number of nodes in one cluster • Currently we think this being a static strategy • Things might be considered in the strategy: different stages, number of children of the node
Current working or ideas • Regularization • Implement a trust region method • Probably only on the master problem for the first stage
Current working or ideas • Purging cuts • As the iterations going on, lots of cuts are accumulated at each node while a lot of them are unnecessary, this is a lot of memory! • Purging all the cuts at one node will break the convergence of the algorithm unless the sub-problem under this node is solved to optimal • May be we can this once a while after several iterations or when the number of cuts reaches a certain amount
Current working or ideas • Making workers “experienced” • A big part in a work is cuts that generated before. It takes time to pack and unpack these information and also it depends on the communication. • We are trying to find out the possibility to store the existing cuts locally at the workers. • In a new work, only updated cut information is included.