Download
1 / 12
120 likes | 898 Views
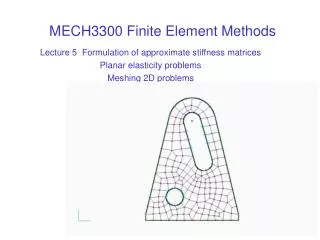
MECH3300 Energy Methods of Hand Calculation. Lecture 1 Strain energy of structural members Castigliano’s theorem Determining deflections. Motivation.

E N D
MECH3300 Energy Methods of Hand Calculation Lecture 1 Strain energy of structural members Castigliano’s theorem Determining deflections
Motivation • Hand calculation of deformation of structures is useful to check computed solutions. An energy method can be an elegant way of finding deflections, and can cope with statically indeterminate cases. • Given the energy stored in a structure we can find either • stiffness (load/deflection) k = F/D • compliance or flexibility (deflection/load) a = D/F • Hand calculation methods tend to do the latter ie express deflections in terms of loads, as this usually gives fewer equations. Most real structures are indeterminate, often with redundant supports. We can find a redundant reaction from the fact it does no work. With several redundant reactions, we can use the energy stored in a structure to write one equation for each and solve them simultaneously.
Derivatives of energy and their uses k, a F = kD D = aF • Assume no heat flows, so 1st law of thermodynamics isW = V • whereW = work of external forces, dW = F.dD • D = deflection at load (in general a vector). • V (or U) = strain energy = area below an elastic load/deflection curve (a form of potential energy). • Consider a single spring to ground, stiffnessk, compliancea = 1/k • V = 1/2 (load)x(delfn.) = area below a load/deflection plot= ½ k D2= ½ a F2 • ¶V/¶D = kD = F • ie differentiating wrt displacements leads to equations containing stiffness values (in general, a stiffness matrix) - used in FEM lectures • ¶V/¶ F =aF =D • ie differentiating wrt loads F leads to equations containing compliances (in generalforming a flexibility matrix, the inverse of a stiffness matrix).
Castigliano’s theorem F C V • This strictly uses “complementary energy” C - the area above a load/deflection curve. • C = V for linear elastic behaviour. • dC = D dF • If one load F only changes, only it contributes to a change in C • Hence the partial derivative of C wrt F gives D, the deflection in the direction of F where Fis applied. • This can be extended to a moment, M. The partial derivative wrt M gives the rotation where M is applied in the same sense of rotation. dC D
Evaluating strain energy of a beam s Now usingU for strain energy = V before. • Per volume, for linear elasticity and uniaxial stress, strain energy • Uv = ½ (F/A)(D/L) = ½ se = area below a stress/strain graph e Axial loading. Stresss = N/A. N = axial load, A = Xsection. Strain e = s/E = N/(EA) dU = Uv dV = ½ s e dV where element of volumedV = A dx, so dU = ½ N2/(EA) dxor over lengthL, U = ½N2L/(EA) Bending.s = Mby/I, e = s/Eso that dU = ½ s e dV U = ½ Mb2/(EI2) (ò y2dA) dx U = ½ Mb2/(EI) dx Torsion of a circular section. Uv = ½ t g wheret = Tr/IP = Gg dU = ½ t g dV U = ½ T2/(GIP2) (ò r2dA) dx U = ½T2/(GIP) dx
Using expressions for energy of a beam • For a uniformly torqued rod of length L, U = T2L/(2EA) • however, for bending, the bending moment is rarely constant, so we must integrate along a beam to find its energy in bending. • To do this we must first find the bending moment Mbas a function of position along the beam, not just maximum values. • If this is a discontinuous function, the integral needs breaking into several integrals over different sections of the beam. • We can avoid algebra by deriving general expressions for derivatives of energy wrt applied forces or moments, and just evaluate the relevant derivatives.
Expressions for derivatives of energy • Suppose a beam is loaded in bending due to a force F. • dU = ½ Mb2/(EI) dx • Suppose a beam is loaded in bending due to an applied moment M. • Suppose that a rod is twisted by due to a force F, which causes a torque Mt. Dis the deflection at the load.
Derivatives of energy for a pin-jointed truss • A pin-jointed truss is an assembly of members stressed axially only. The deflection due to an applied load F is a summation over all members i, each with member tension Ni. • U = S Ni2Li/(2EAi) • ¶U/¶F = U/Ni Ni/ F = S [{NiLi/(EAi)} ¶Ni/¶F] = D • We can also find derivatives wrt internal loads Ni. These do no resultant work, unless the member was the wrong length initially, as equal and opposite forces act across a cut. Hence summing over all members j (including member i) • U/Ni = 0 = S [{NjLj/(EAj)} ¶Nj/¶Ni] • This can be used to find the tension in a redundant member. • Both these sums can be done as a table (eg in a spreadsheet). Ni
Derivatives wrt reactions R • For a reaction R that cannot be found from statics, U/R = 0 gives an equation for R, relating it to the applied loading. • If a support can subside, U/R = subsidence. • Mixtures of energy terms • All types of energy expressions can be added together as needed (eg a deflection may be due to bending, twisting and axial loading). For a short beam, energy due to transverse shear stress and strain may also need to be included. • In 2D, triangulated frames have members mainly loaded axially. Open (non-triangulated) frames are mainly loaded in bending. • In 3D open frames, members both bend and twist.
Example 1 C P x y A Properties E, G, I, IP L • Find the tip deflection of the member shown. (A determinate problem) • To find a bending moment, we look at one side of a cut - pick the side that gives the simpler expression for Mb. The choice of origin for measuring position is arbitrary. Again this can be chosen to simplify the algebra, and more than one origin can be used. • Here in AB, Mb = P x and in BC, Mb = P y and Mt = PL L B
Example 2 (also determinate) • Find the central deflection of the member shown. • As there is no load at the centre, we put one there (H) and then set it to zero after finding the deflection (a “ghost” load). x H q per length qL/2 - H/2 qL/2 - H/2 L/2 L/2 For the left half Mb = q x2/2 - qLx/2 + Hx/2 Mb/H= x/2 The total energy is twice that of the left half. With H = 0 evaluating the integralD = -(5/384) qL4/(EI) (Minus as H up)
Example 3 (also determinate) 20 10 L 102 102 102 -10 • Find the tip deflection of the pin-jointed truss shown. -10 -30 -20 -10 10 L Member loads are found by summing forces at joints as shown. Members are all the same material and cross-section. Ni/ F is the load in member i due to unit F. Ie the above loads/10. Hence S [{NiLi/(EAi)} ¶Ni/¶F] = D = (-10*(-1)-20*(-2)-30*(-3))L/(EA) {bottom members} + (102* 2 *3)L2/(EA) {inclined members} + (-10*(-1_)-10*(-1))L/(EA) {vertical members} + (10*1 + 20*2)L/(EA) {top members} = (210 + 602) L/(EA)=D