Download
1 / 22
220 likes | 238 Views
ECE 574: Infrared Imaging Sensor Brick for the MODSEN Robot. . ECE 574 – SPRING 2004 Final Presentation. Presented by Nikhil Arun Naik. About this Presentation. Objective of the project. Achievements of this Semester. Testing and Evaluation. Conclusions. Future work.

E N D
ECE 574: Infrared Imaging Sensor Brick for the MODSEN Robot. ECE 574 – SPRING 2004 Final Presentation Presented by Nikhil Arun Naik
About this Presentation... • Objective of the project. • Achievements of this Semester. • Testing and Evaluation. • Conclusions. • Future work.
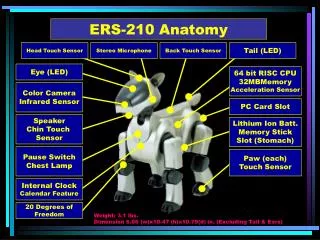
Objective of the Project... • Objective of the project as defined at the start of the semester was Implementation of the Infrared Sensor Brick for the MODSEN Robot. • Take the Design of the Thermal Sensor Brick done in FALL 2003 and continue on it. • Make the Design optimum with regards to size of the sensor brick, so that we maximize on the use of Omega (world’s smallest thermal camera) on the sensor brick. • Actually build the system by implementing our brick design and set it up in working condition.
Achievements of this Semester... • Started with Design – 1 of the sensor brick from FALL 2003. • Design – 2 had a Shuttle PC as the CPU which made the brick smaller in size. • Design – 3 has a notebook computer manufactured by Toshiba Inc. as the CPU. • All the designs were considered by seeking Justin’s opinion.
Achievements of this Semester... • The CPU used on the sensor brick is the Toshiba Satellite Notebook A10-S129 which is a 2.4 GHz Celeron notebook computer manufactured by Toshiba Inc. It was purchased from NewEgg.com.
Achievements of this Semester... • The 802.11g W-LAN network adapter USB card that has been used on the brick is WUSB54G manufactured by Linksys Inc. • The thermal sensor used on the brick is Omega infrared camera, manufactured by Indigo Systems Corporation. • The Video Capture (Frame Grabber) card that has been used is VCE-PRO Fast Analog Card Bus Video Capture card from IMPERX.
Achievements of this Semester... • Component wise Diagram of the sensor brick system. Host Computer • The sensor brick system.
Achievements of this Semester... • Pre-processing operations were done on the captured input data. • Since raw images obtained after acquisition were found to be RGB (3 Channel) images so we first obtained the intensity image before performing further processing operations. • The histogram of an image gave us all the necessary information regarding an image. • We now had an idea about the gray level intensity distribution which could be effectively used in the process of intrusion detection.
Achievements of this Semester... • Since both the original RGB image and the intensity image were gray scale images it was felt that a colored image would help us in getting a better understanding of the image details. • Hence the next operation that was done on the input image was to pseudo color the intensity image using different color bars. • The color image gave us some more detailed information like difference in heat patterns in the image and helped us in detecting glaring irregularities (presence of humans and other objects).
Achievements of this Semester... • Next we performed the task of intrusion detection using pseudo colored images. • Here firstly we trained a background image which was the image of the area that is meant to be guarded against intrusion. • Then for every frame we subtracted this background image from the current image. This gave us the difference image. • This difference image helped us in detecting humans and other objects entering that secure location.
Achievements of this Semester... • Next we performed the task of intrusion detection using edge detected images. • Here too we firstly trained a background image which is the image of the area that is meant to be guarded against intrusion. • Then for every frame we subtracted this background image from the current image. This gave us the difference image. • Then we converted this difference image into a binary image by setting a threshold. • Next we applied the edge operators on this binary image to obtain the edges in the image.
Achievements of this Semester... • The thermal sensor brick has been built. • It has a box built for it made using acrylic sheets. • The final out look of the Sensor brick is as shown.
Achievements of this Semester... • We designed an indigenous GUI for the thermal sensor brick. • The GUI does not function in real time. • It has functions to capture Full frame size image, Half frame size image and Quarter frame size image. • It can capture a single frame, a sequence of frames and a video sequence. • It can show gray scale (intensity image), histogram and pseudo - colored images. • Display the results of intrusion detection using both pseudo - colored method and edge detection method.
Testing and Evaluations... • The system was successfully tested and it was found that all the brick components worked satisfactorily as per the design requirements. • The system has a battery life of approximately 2 hrs. • We were successful in transmitting raw data over the W-LAN. The host computer could receive live streaming video from the sensor brick CPU via the network using remote desktop connection.
Conclusions... • The thermal sensor brick system was successfully built. • All the desired Pre-processing operations were successfully completed, tested and satisfactory results were obtained. • The GUI has been designed but it does not work in real time. • All the tasks scheduled for the semester were successfully accomplished.
Future Work... • Look at working towards setting up the GUI for the thermal sensor brick that has been designed by us to be working in real time. • By getting the GUI to work in real time and allow the user to control data acquisition and pre- processing operations. • Explore all the possible options available for setting up live streaming video over the internet. May be select one and work detail towards it.
End... • Thank You. • Any