Enhancing Distributed Tracking in Wireless Sensor Networks Using Extended Kalman Filtering
This project explores the robustness of tracking applications within wireless sensor networks (WSNs) through the development of an ADMM consensus-based extended Kalman filter. Traditional centralized Kalman filtering offers limited robustness against node failures, while ad hoc networks can potentially improve resilience by allowing each sensor to perform local filtering. Simulated in MATLAB, the study aims to compare the performance of centralized and ad hoc networks. The preliminary results indicate effective performance for centralized systems, while ongoing efforts focus on refining the ad hoc filtering algorithm for improved accuracy and performance.

Enhancing Distributed Tracking in Wireless Sensor Networks Using Extended Kalman Filtering
E N D
Presentation Transcript
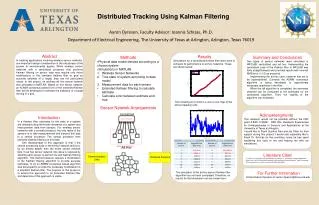
Distributed Tracking Using Kalman Filtering Aaron Dyreson, Faculty Advisor: IoannisSchizas, Ph.D. Department of Electrical Engineering, The University of Texas at Arlington, Arlington, Texas 76019 Abstract In tracking applications involving wireless sensor networks, one important design consideration is the robustness of the system to environmental agents. While wireless sensor networks with a centralized processor that performs Kalman filtering on sensor data may require only minor modifications to the standard Kalman filter to give an accurate estimate of a target, they are not particularly robust. In this project, an arbitrary ad hoc sensor network was simulated in MATLAB. Based on this sensor network, an ADMM consensus based form of the extended Kalman filter will be developed to estimate the trajectory of a target moving in a grid. Results Simulations for a centralized Kalman filter were done to compare its performance to ad hoc networks. These are shown below: • Methods • Physical data model derived according to a chosen system • Simulations in MATLAB • Wireless Sensor Networks • True state of system according to data model. • Measurement data for each sensor • Extended Kalman filtering to calculate estimate • Calculate error between estimate and true. • Sensor Network Arrangements Summary and Conclusions Two types of sensor networks were simulated in MATLAB: centralized and ad hoc. Implementing the centralized case of the Kalman filter in MATLAB was fairly straightforward and provided results with minimal RMS error (<1.5) as expected. Implementing the ad hoc case, however has yet to be accomplished. Currently the ADMM consensus algorithm is being developed to approximate necessary quantities in the filter. When the full algorithm is completed, the estimates obtained can be compared to the estimates for the centralized algorithm. Then, the viability of the algorithm can evaluated. The following error chart is a one-to-one map of the above trajectory plot. Centralized Acknowledgments This research would not be possible without the NSF grant # EEC-1156801, REU Site: Research Experiences for Undergraduates in Sensors and Applications at the University of Texas at Arlington. I would like to thank GuohuaRen and Jia Chen for their support during this project. I would also especially like to thank Dr. Schizas for the countless hours he has spent explaining this topic to me and helping me with my simulations. Introduction In a Kalman filter, estimates for the state of a system are obtained using the known dynamics of a system and measurement data from sensors. For wireless sensor networks with a central processor, the only tasks of the sensors is to take measurements and transmit this data to a central processor. The central processor then performs Kalman filtering on this data. One disadvantage of this approach is that if the central processing node of the sensor network fails (e.g. by an enemy attack) then the entire sensor network fails. In ad hoc sensor network, this issue is resolved by allowing each sensor to perform its own Kalman filtering algorithm. This method however requires a modification of the Kalman filtering algorithm to provide accurate estimates. In [1] an ADMM consensus based algorithm was developed to provide the necessary modification to a standard Kalman filter. The purpose of this project is to extend this approach to an Extended Kalman filter and determine if this approach is viable. Central Processor Ad Hoc Literature Cited 1. Schizas, I.D.; Giannakis, G.B.; Roumeliotis, S.I.; Ribeiro, A., "Consensus in Ad Hoc WSNs With Noisy Links—Part II: Distributed Estimation and Smoothing of Random Signals," Signal Processing, IEEE Transactions on , vol.56, no.4, pp.1650,1666, April 2008 Communication Links Wireless Sensors For Further Information Contact Aaron Dyreson at: aaron.dyreson@mavs.uta.edu The simulation of the ad hoc sensor Kalman filter algorithm has not been completed. Therefore, no results for that simulation can be shown here.