Download
1 / 33
340 likes | 656 Views
Chapter 27: Linear Filtering - Part I: Kalman Filter. Standard Kalman filtering – Linear dynamics. Kalman Filter. Model dynamics – discrete time x k+1 = M(x k ) + W k+1 or Mx k + w k+1 x k : true state w k : model error x k ∊ R n , M: R n R n , M ∊ R n x n Observation

E N D
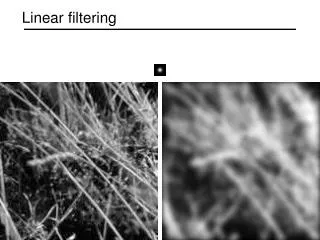
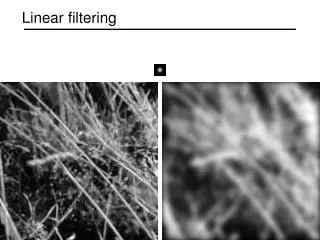
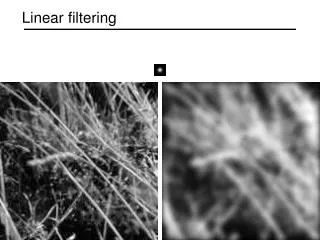
Chapter 27: Linear Filtering - Part I: Kalman Filter Standard Kalman filtering – Linear dynamics
Kalman Filter • Model dynamics – discrete time • xk+1 = M(xk) + Wk+1 or Mxk + wk+1 • xk: true state • wk: model error • xk∊ Rn, M: Rn Rn, M ∊Rn x n • Observation • zk = h(xk) + vk or Hxk + vk • h: Rn Rm, H ∊Rm x n , vk∊ Rn • E(vk) = 0, COV(vk) = Rk
Filtering, Smoothing, Prediction FN = {zi | 1 ≤ I ≤ N } [Wiener, 1942] [Kolmogorov, 1942] k < N Smoothing k = N filtering k > N Prediction Go to page 464 – classification
Statement of Problem – Linear case • x0 ~ N(m0, P0) • xk+1 = Mkxk + wk+1, wk ~ N(0, Qk) • zk = Hkxk + vk, vk ~ N(0, Rk) • Given Fk = { zj | 1 ≤ j ≤ k }, find the best estimate of xk that minimizes the mean squared error E[(xk - )T(xk - )] = tr[ E(xk - ) (xk - )T] = tr[ ] • If is also unbiased => it is min. variance!
Model Forecast Step • At time k = 0, F0 – initial information is given • Given , the predictable part of x1 is • Error in prediction 0 1
Forecast covariance • Covariance • Predicted Observation • E[z1/ x1= x1f] = E[H1x1+v1|x1=x1f] = H1x1f • COV(z1|x1f) = E{[z1 – E(z1|x1f)][z1 – E(z1|x1f)]T} = E(v1v1T) = R1
Basic idea • At time k = 1 • Fast Forward • Time k-1 to k x1f z1 P1f R1 0 1 xkf zk Pkf Rk k k-1
Observations at time k • Model predicted observations
Data Assimilation Step prior Kalman Gain Innovation
Posterior estimate – also known as analysis • Substitute and simplify
Covaiance of analysis • => where
Conditions on the Kalman gain – minimization of total variance • Kk = PkfHkTDk-1 = PkfHkT[HkPkfHkT + Rk]-1 • 1. • 2.
Comments on the Kalman gain • 3. An Interpretation of Kk: n = m, Hk = I • Let Pkf = Diag [ P11f P22f … Pnnf] Rk = Diag [ R11 R22 … Rnn] • Kk = PkfHkT[HkPkfHkT + Rk]-1 = Pkf[Pkf + Rk]-1 = Diag[ P11f/(P11f+R11) , P22f/(P22f+R22), ….., Pnnf/(Pnnf+Rnn)] • = xkf + Kk[z-Hxkf] = xkf + Kk[z-xkf] = (I-Kk)xkf + Kkz • ∴ If Piif is large, zi,k has a larger weight
Comments – special cases • 4. is independent of observations • 5. No observations • xkf = Pkf = for all k ≥ 0 • xkf = Mk-1xk-1f = Mk-1Mk-2Mk-3…..M1M0x0f • Pkf = Mk-1Pk-1fMk-1T + Qk = M(k-1:0)P0MT(k-1:0) + ∑ M(k-1:j+1)Qj+1MT(k-1:j+1) where M(i,j) = MiMi-1Mi-2….Mj, Qj ≡ 0 • Pk+1f = M(k-1:0)P0MT(k-1:0)
Special cases - continued • 6. No Dynamics • Mk =I, Wk ≡ 0, Qk ≡ 0 • xk+1 = xk = x • zk = Hkx + vk • xkf = with = E(x0) • Pkf = with = P0 • => • Same as (17.2.11) – (17.2.12) Static case
Special cases • 7. When observations are perfect • Rk ≡ 0 • => Kk = PkfHkT[HkPkfHkT + Rk]-1 = PkfHkT[HkPkfHkT]-1 • Hk: m x n, Pkf: n x n, HkT: n x m • => [HkPkfHkT]-1: m x m • Recall: • From (27.2.19):
Special cases • ∴ ( I- KkHk ) = ( I – KkHk )2, idempotent • Fact: Idempotent matrices are singular • => Rank of ( I- KkHk ) ≤ n – 1 • ∴ Rank( ) ≤ min {Rank( I- KkHk ), Rank( Pkf )} ≤ n – 1 • ∴ Rank of ≤ n – 1 • ∴ When Rk is small, this will cause computational instability
Special cases • 8. Residual Checking • rk = zk – Hkxkf = innovation • = xkf + Kkrk • rk = zk –Hkxkf = Hkxk + vk – Hkxkf = Hk(xk – xkf) + vk = Hkekf + vk • ∴ COV(rk) = HkPkfHkT + Rk • ∴ By computing rk and its covariance, we can check if the filter is working O.K.
Example 27.2.1 Scalar Dynamics with No Observation • a > 0, wk ~ N( 0, q), x0 ~ N(m0, P0) • xk = axk-1 + wk • E(xk) = akE(x0) = akm0 • Pk = Var(xk) = Var(axk-1 +wk) = a2Pk-1 + q • ∴ Pk = a2kP0 + q[(a2k -1)/(a2 – 1)]
Scalar dynamics • Note: For a given m0, P0, q, the behavior of the moments depends on a • 1. 0 < a < 1 • lim E(xk) 0, lim Pk = q/(1-a2) • 2. 1 < a < ∞ • lim E(xk) = 0, lim Pk = ∞ • 3. a = 1 • xk = x0 + ∑wk • E(xk) = m0 • Pk = P0 + kq
Example 27.2.2 Kalman Filtering • xk+1 = axk + wk+1, wk+1~(0,q) • zk = hxk + vk, vk~N(0,r) • xk+1f = a • Pk+1f = a2 + q • = xkf + Kk[zk – hxkf] • Kk = Pkfh[h2Pkf + r]-1 = hr-1 • = Pkf – (Pkf)2h2[h2Pkf + r]-1 = Pkfr[h2Pkf+r]-1
Recurrences: Analysis of Stability • HW. 1 • xk+1f = a(1-Kkh)xkf + aKkzk • ek+1f = a(1-Kkh)ekf + aKkvk + wk+1 • Pk+1f = a2 +q • = Pkfr(h2Pkf+r)-1
Example continued • Pk+1f = a2Pkfr / (h2Pkf+r) + q • Pk+1f / r = a2Pkf / (h2Pkf + r) + q/r = a2(Pkf/r) / [h2(Pkf/r) + 1] + q/r • Pk+1 = a2Pk/(h2Pk+1) + α • α = q/r (ratio) • Pk = Pkf/r • Riccati equation ( First-order, scalar, nonlinear)
Asymptotic Properties • Let h = 1 • Pk+1 = a2Pk/(Pk+1) + α • Let δk = Pk+1 – Pk = a2Pk/(Pk+1) – Pk + α = [-Pk2 + Pk(a2- 1 + α) + α]/(Pk+1) • ∴ δk = g(Pk)/(Pk+1) • where g(Pk) = -Pk2 + Pk(a2 + α - 1) + α
Example continued • When Pk+1 = Pk, => δk = 0 => equilibrium • => δk = 0 if g(Pk) = 0 • -Pk2 + Pk(a2 + α – 1) + α = 0 • -Pk2 + β Pk + α = 0 • Evaluate the derivative of g(.) at P* and P* • g’(Pk) = -2Pk + β β
Example continued • ∴ P* is an attractor – stable P* is a repellor – unstable • Thus, • => P* = a2P*/(P*+1) + α
Rate of Convergence • Let yk = pk – p* , pk+1 = a2pk/(pk+1) + α • yk+1 = pk+1 – p* = [a2pk/(pk+1) + α] - [a2p*/(p*+1) + α] = a2pk/(pk+1) - a2p*/(p*+1) = a2(pk – p*)/[(1+pk)(1+p*)] = a2yk/[(1+pk)(1+p*)] • ∴ 1/yk+1 = [(1+pk)(1+p*)]/ a2yk = [(1+yk+p*)(1+p*)] / a2yk = [(1+p*)/a]2/yk + (1+p*)/a2
Rate convergence - continued • zk = 1/yk • => zk+1 = czk + b where c = [(1+p*)/a]2 and b = (1+p*)/a2 • Iterating: • ∴ when c> 1 (ie) c = [(1+p*)/a]2 >1 • When this is true, yk 0 at exp. rate
Rate of convergence - continued • From (27.2.38) h = 1 • Analysis Covariance Converges
Stability of the Filter • h = 1 • ek+1f = a(1-Kkh)ekf + aKkvk + wk+1 • -- homo part • Kk = pkf/(pkf+r) = pk/(pk+1) • 1 – Kk = 1/(pk+1) • ∴ • ∴