
ROBOTI
E N D
Presentation Transcript
Šta je robot? Kako bi brže i efikasnije obavljao određene radnje, čovek je stvorio robota. Robotom se, u pravom smislu reči, smatra mašina koja može da se kreće i izvršava različite zadatke bez čovekove pomoći i uopšte ne mora da ima ljudski izgled. Reč robot nastala je od češke reči robotik, što znači rob- radnik. Roboti koji imaju oblik ljudskog tela zovu se humanoidni roboti. Ukoliko oponašaju kretanje ljudskog tela, govor i gestikulacije, radi se o androidima.
Preteče robota Mehanička stvorenja, igračke na navijanje i lutke koje hodaju imale su značajnu ulogu u razvoju robotike. Ove mašine zovu se automati, prema grčkoj reči od koje potiče pridev ,,automatski”.
Veštačka intaligencija Ljudi i životinje odlikuju se razumom. Da bi neka naprava mogla da ih oponaša morala bi da poseduje veštačku intaligenciju. Naučnici su do sada postigli određeni uspeh u stvaranju veštačke intaligencije. Čuvena rečenica profesora Arona Slomena: ,,Moguće je da su naši mozgovi isuviše složeni da bi ih shvatili tako jednostavni mozgovi kao što su naši.”
Prema primeni roboti se mogu podeliti na: - Robote za opsluživanje - Tehnološke robote - Montažne robote
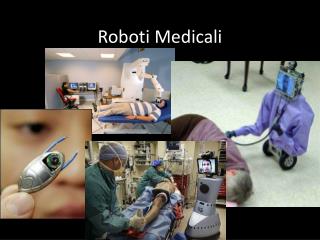
Industrijski robot Industrijski robot je uređaj velikih mogućnosti kretanja opremljen mehaničkom rukom (manipulator) i zasebnim upravljačkim sistemom realizovanim na elektronskom računaru.
Roboti u pokretu Pravi roboti su u stanju da se krecu i da obavljaju zadatke koji su im povereni. Njihovi pokreti moraju biti složeniji i prilagodljiviji porlozi po kojoj se kreću. Jedno od rešenja bile su ruke i noge, ali za njihovo pokretanje potrebna je robotizovana verzija mišića.Naučnici i inženjeri preradili su postojeće pogonske uređaje da bi dobili robotske mišiće, a smislili su i druge načine.
Mehanička osnova robota Robot je sastavljen iz delova koji su povezani mehaničkim zglobovima. Takva dva uzajamno povezana dela koja omogućuju pomeranje čine kinematski par. Broj slobodnih – mogućih nezavisnih kretanja naziva se stepen slobode. Ako poveežmo dva dela robota tako da jedan ulazi u drugi, krećući se unutar njega, dobijamo kretanjne zvano translacija, a ako se delovi okreću oko zajedničkog zgloba, onda se takvo kretanje naziva potacija. Kinematski lanac predstavlja više međusobno povezanih kinematskih parova.
Pogon robota Kako čovekovu ruku pokreću mišići, na sličan način robotovu ruku pokreću motori preko različitih prenosnika (pužnim reduktorom, zupčastim remenom, lančanim prenosnikom, zupčastom letvom...). Osim elektromotornog pogona za pokretanje robota, postoje i hidraulični i pneumatski pogon.
Upravljanje robotima Upravljane robotima ostvaruje se na različite načine, u zavisnosti od zadataka koje oni treba da izvrše. Za izvršenje zadataka translacionog i rotacionog kretanja robotove ruke najčešće su potrebni elektromotori. Najjednostavnije upravljanje robotom ostvaruje se preko računara.
Kiborg Kiborg je ljudsko biće sa mašinskim aplikacijama. Termin je 1960. godine dao istraživač Manfred Klajns da bi objasnim što je sve doneo napredak biomedicinskog inženjeringa (veštački udovi, pejsmejker, sintetičke telesne i organske proteze...).
Roboti iz sveta mašte U svetu robotike mašta i tehnologija tesno su povezane. Mnogi ljudi su o robotima su prvi put saznali preko knjiga, filmova i televizije. Roboti postaju sve sličniji ljudima i time podstiču izmišljanje još neverovatnijih i zanimljivijih junaka.