OBJECTIVES
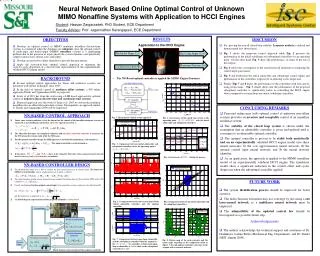
Neural Network Based Online Optimal Control of Unknown MIMO Nonaffine Systems with Application to HCCI Engines. Student : Hassan Zargarzadeh, PhD Student, ECE Department. Faculty Advisor : Prof. Jagannathan Sarangapani, ECE Department . RESULTS Application to the HCCI Engine

OBJECTIVES
E N D
Presentation Transcript
Neural Network Based Online Optimal Control of Unknown MIMO Nonaffine Systems with Application to HCCI Engines Student: Hassan Zargarzadeh, PhD Student, ECE Department Faculty Advisor: Prof. Jagannathan Sarangapani, ECE Department • RESULTS • Application to the HCCI Engine • The NN-Based optimal controller is applied the MIMO Engine Dynamics. • OBJECTIVES • Develop an optimal control of MIMO nonlinear nonaffine discrete-time systems is considered when the dynamics are unknown since the optimal control of multi-input and multi-output (MIMO) nonaffinesystems is a challenging problem due to the presence of inputs inside the system dynamics and potentially complex interactions among states and inputs. • Develop an innovative online identifier to provide the gain matrix. • Apply the forward-in-time optimal control approach to minimize thecycle-by-cycle dispersion of a discrete-time representation of the experimentally validated HCCI engine model. • DISCUSSION • For proving the overall closed-loop stability, Lyapunov analysis is utilized and demonstrated (not shown here). • Fig. 1 shows the proposed control approach while Fig. 2 presents the performance of the initial stabilizing and suboptimal controllers for an operating point. On the other hand, Fig. 3 shows the performance in terms of the one of the outputs. • Fig. 4 shows the convergence of the neural network identifier in estimating the control input gain matrix • Fig. 5 and 6 illustrate the initial admissible and suboptimal control inputs and performance of the controllers respectively in reducing cyclic dispersion. • Finally, Figs 7 and 8 depict the performance of the controllers with time and by using return maps. Fig. 7 clearly shows that the performance of the proposed suboptimal controller is significantly better in controlling the HCCI engine when compared to an open loop and initial stabilizing controllers. The Intake Temp The Crank Angle Maximum Pressure Lean Equivalence Ratio • BACKGROUND • Several optimal control approaches for linear and nonlinear systems are presented with offline techniques since 1985. • In the field of optimal control of nonlinear affine systems, a NN online approach (Dierks and Jagannathan 2009) is proposed. • Lewis et al 2010 has done the work using a LMI based approach for optimal control of unknown linear discrete-time and continuous-time systems. • Proposed approach uses the work of Yang et al. 2007 to convert the nonlinear nonaffine into an affine-like equivalent system. Subsequently, an approach similar to Dierks and Jagannathan 2009 will be employed. • CONCLUDING REMARKS • Proposed online near (sub) optimal control of unknown non-affine systems provides an accurate and acceptable control of an nonaffine nonlinear system. • The stability of the closed loop system is shown under the assumption that an admissible controller is given and updated until it converges to an admissible optimal controller. • The optimal controller is proven to be stable both analytically and on an experimentally validated HCCI engine model uses three neural networks: 1) the cost approximation neural network; 2) the optimal control input neural network; and 3) the neural network identifier. • As an application, the approach is applied to the MIMO nonaffinemodel of an experimentally validated HCCI engine. The simulation results show a significant reduction in the control effort and cyclic dispersion when the suboptimal controller applied. • NN-BASED CONTROL APPROACH • Under some certain conditions, it can be shown that the control of the nonaffine nonlinear system can expressed as state feedback control of an affine-likeequivalent system as • The affine-like dynamics are completely unknownand an initial admissible controlleris necessary for the NN to keep the system stable while the NN learns. • For the optimal controller design, the HJB approach is used that for minimizing a cost function as • .The optimal controller can be obtained as • In the above, , , and a have to be estimated. Therefore, three separate neural network based estimators and system identifierare utilized Fig. 1. The proposed control system approach. Fig. 2. Convergence of the closed loop system at the operating point with the initial admissable and suboptimal controllers. Fig. 3. Comparison between initial admissable and suboptimal controllers where the operating point is . Fig. 4 Convergence of during the process. • NN-BASED CONTROLLER DESIGN • The identification block uses a NN to estimate the gain matrix necessary in control signal. The Innovative MIMO system identifier and its weight update law is given as follows: • The index function should also be estimated using another NN which done by (Travis Dierk 2009) with a NN estimator as . . • Finally, the forward in time optimal control input to the nonaffine system is defined as the following NN • and the update law is proposed as • The block diagram representation of the proposed controller is shown below. • FUTURE WORK • The system identification process should be improved for better accuracy. • The index function estimation may not converge by just using a one layer-neural network so a multilayer neural network must be employed. • The admissibility of the updated control lawshould be investigated as a possible future step. • The authors acknowledge the technical support and assistance of Dr. Drallmeier, Joshua Bettis (Mechanical Eng. Department), and Dr. Dierks (MST alumni 2009). Fig. 5. A comparison between the system input of the initial admissible controller and the optimal controller. Fig. 6 Comparison between the initial admissible and the suboptimal controllers. System Outputs System Inputs NN-System Identifier Acknowledgements NN-Index Function Estimator NN-Optimal Controller Fig. 7. Comparison between open loop, admissible, and the sub-optimal controller when the setpoint is : the controller switches from open-loop to admissible at k=400; then, to the sub-optimal controller at k=800. Fig. 8. Return map of the peak pressure and the crank angle regarding to the comparison made in Figure 7; the sub-optimal controller converges to the setpoint with a transient behavior. Desired Value Block diagram representation of the proposed controller