Download
1 / 1
10 likes | 183 Views
Observed CO 2 concentrations. Optimization. Modeled CO 2 concentrations. Global transport model (PCTM). Ocean fluxes. Land fluxes (Bios + FF). #. #. #. #. Minimize cost function J. Discrete stochastic-dynamic model. x k-1 – model state w k-1 – model error (stochastic forcing)

E N D
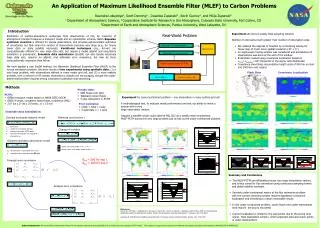
Observed CO2 concentrations Optimization Modeled CO2 concentrations Global transport model (PCTM) Ocean fluxes Land fluxes (Bios + FF) # # # # Minimize cost function J Discrete stochastic-dynamic model xk-1 – model state wk-1 – model error (stochastic forcing) M – non-linear dynamic (NWP) model G – operator reflecting the state dependence of model error Change of variable Discrete stochastic observation model - model state vector of dim Nstate >>Nens - control vector in ensemble space of dim Nens ek – measurement + representativeness error H – non-linear observation operator (M D ) Forecast error covariance Analysis error covariance References: Peters, W., J.B. Miller, J. Whitaker, A.S. Denning, A. Hirsch, M.C. Krol, D. Zupanski, L. Bruhwiler, and P.P. Tans, 2005: An ensemble data assimilation system to estimate CO2 surface fluxes from atmospheric trace gas observations. J. Geophys. Res, 110 (D24) Zupanski, M.,2005:Maximum likelihood ensemble filter: Theoretical aspects, Monthly Weather Review, 133, 1710-1726 An Application of Maximum Likelihood Ensemble Filter (MLEF) to Carbon Problems Ravindra Lokupitiya1, Scott Denning1 , Dusanka Zupanski2 , Kevin Gurney3, and Milija Zupanski2 1 Department of Atmospheric Science, 2 Cooperative Institute for Research in the Atmosphere, Colorado State University, Fort Collins, CO 3Department of Earth and AtmosphericSciences, Purdue University, West Lafayette, IN Introduction Estimation of surface-atmosphere exchanges from observations of CO2 by inversion of atmospheric transport requires a transport model and an optimization scheme. Batch Bayesian synthesis inversion is efficient for sparse observations, and provides self-consistent estimates of uncertainty, but fails when the number of observations becomes very large (e.g., for hourly tower data or daily satellite retrievals). Variational techniques (e.g., 4d-var) are computationally efficient for very large data sets, but require a model adjoint and uncertainty estimation is problematic. Ensemble data assimilation (EnsDA) can also handle extremely large data sets, requires no adjoint, and estimates error covariance, but may be more computationally expensive than 4d-var. We have applied a new EnsDA method, the Maximum Likelihood Ensemble Filter (MLEF) to the source estimation problem. We show results of two experiments using synthetic data: (1) a very large problem, with observations defined in every model grid cell, and (2) a more realistic problem, with a network of 85 weekly observations. Results are encouraging, though the under-determined problem requires strong covariance localization and smoothing. • Experiment 2: Current weekly flask sampling network • Number of unknowns much greater than number of observation sites. • We reduced the degrees of freedom by considering solving for fluxes map of much lower spatial resolution (10°× 6°). • An eight-week moving window was considered and assimilation of observations was done at the end of the window. • Ensembles created using covariance localization based on Prior/ Posterior 60th Percentile of the sigma ratio distribution • Covariance smoothing: decorrelation length scale of 900 km on land and 2000 km over oceans Real-World Problem Flask Sites Covariance Localization Methods • Pseudo-data: • SiB3 fluxes over land • Takahashi ocean fluxes • 4-year integration in PCTM • PCTM: • Offline transport model based on NASA GSFC fvGCM • GEOS 4 winds, convective mass fluxes, turbulence (PBL) • 2.5° lon x 2° lat x 25 levels, t = 15 min Experiment 1: Even-constrained problem -- one observation in every surface grid cell A methodological test, to evaluate model performance and test our ability to invert a system with a very large observation vectors. Imagine a satellite which could observe PBL CO2 as a weekly mean everywhere. MLEF-PCTM solves this very large problem just as fast as the under-constrained problem. Experiment 1: Even-constrained problem -- one observation in every surface grid cell A methodological test, to evaluate model performance and test our ability to invert a system with a very large observation vectors. Imagine a satellite which could observe PBL CO2 as a weekly mean everywhere. MLEF-PCTM solves this very large problem just as fast as the under-constrained problem. • Prior estimates: • CASA + Taka + noise • model-data = 1 ppm Ensemble data Assimilation: Nens = 500 for exp 1Nens = 200 for exp 2 Summary and Conclusions • The MLEF-PCTM can efficiently process very large observation vectors, and is thus suited for flux estimation using continuous-sampling towers and global satellite retrievals. • Severely under-constrained nature of the flux estimation problem with the current observing system requires aggressive covariance localization and smoothing to obtain reasonable results • In the under-constrained problem, ocean fluxes and under-represented • land regions are poorly recovered • Current localization is limited to the land points due to the strong land • signal. New localization scheme, which separates land and ocean points • is under development. Acknowledgements: We would like to thank Wouter Peters for his valuable comments and David Baker for providing the low resolution PCTM model. This research is supported by grants from National Aeronautics and Space Administration (NNG0GD15G & NNG0541G)