Download
1 / 20
200 likes | 302 Views
Learn about signals, systems, and their applications in modern technology. Understand digital signal processing and the importance of linear systems. Explore various engineering fields of application such as communications, control, and biomedical signal processing.

E N D
Linear Systems (ENGR 365)Messiah CollegeSpring 2006 Dr. Harold R. Underwood Assoc. Prof. of Engineering & Physics F225 / x7125 / HUnder@messiah.edu Classes: F156 / Labs: F166 and F254
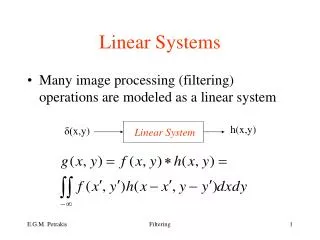
Preface to Linear Systems • Signals • Without them, systems would be worthless • Examples* • Speech & Images as in face-to-face human communication • Email & text msgng as in distant electronic communication • Heartbeat (ECG), Brainwaves (EEG) and Blood Pressure for medical monitoring of patient health • Temperature, Atmospheric Pressure, Humidity, Wind Speed & Direction as in weather forecasting • Deep Space Probe sending remote sensing data • Definition of a signal*: a function of one or more variables that conveys information on the nature of a physical phenom. *Haykin & Van Veen. Signals & Systems, 2/e. Wiley, Hoboken, NJ: 2005.
Preface to Linear Systems • Systems • Less detail about individual devices • More about • Behavior of the overall network of connected devices • Approaches applicable to such networks, especially in Discrete Time (DT), intentionally emphasized in this course • Characteristics that further our engineering goals of analysis and design
Preface to Linear Systems • What is a system? • Generates a signal or extracts information • Human speech comm. (natural or artificial) • Generation: vocal tract or electronic speech synthesis • Recognition: ears / auditory pathways / brain or automatic speech recognition system (ASRS) • Purpose: depends on the application • ASRS may be to recognize or identify speaker • Elect. Comm. Syst. to transport information reliably • Aircraft Landing System to keep it on the runway centerline • Definition*: an entity that manipulates one or more variables to accomplish a function, thereby yielding new signals. * Haykin & Van Veen
Preface to Linear Systems • Linear • What are the advantages? • Faithful (undistorted) reproduction • Scalable (multiplication applies) • Summable (addition property applies) • Disadvantages? • Some practical systems do not satisfy these properties. HOWEVER,nonlinear systems may sometimes be treated as approximately linear within appropriate limits.
Preface to Discrete Time (DT) Systems • Discrete Time: a system whose input and output progress over uniform time increments only • Examples • Financial Investments (e.g., daily stocks, etc.) • Digital Electronics driven by a clock oscillator • Personal Computer (PC with general processor) • Digital Signal Processor (DSP dedicated device)
Introduction to Linear Systems • Include both analog and digital versions • Analog (continuous time functions) • Digital (discrete time functions: sequences) • Digital versus Analog signal processing • Analog methods: Traditional, Simpler and Directly compatible with analog signals • Digital methods: • Flexibility: hardware may be reprogrammed for new applications rather than reconstructed • Repeatability: not subject to parameter variations
Introduction to Linear Systems • Why does ENGR 365 emphasize digital? • To better understand and exploit the power of digital signal processing methods • Brings better balance to your electrical or computer concentration: already dealt (or will deal) with analog linear systems in Circuits, Exp. Methods, Devices and Control Systems (e.g., use Laplace Transform as network transfer function)
Engineering Fields of Significant Applications* • Communications Systems • Control Systems • Micromechanical (MEMS) Systems • Remote Sensing • Biomedical Signal Processing • Auditory Systems • Others * Haykin & Van Veen provides background on each of these.
Communication Systems • Basic elements: • Transmitter • Channel • Receiver • Typical Processes • Analog: modulation & demodulation • Digital: sampling, quantization, coding & sig. est. • Error Detection & Correction (EDC): channel encoder & decoder to combat noise effects
Control Systems • Basic elements: • Controller (often a digital computer) • Plant (vehicle, factory, robot, tool, etc.) • Sensors (GPS, temp., pressure, etc.) • Process: closed-loop feedback • Purpose • Regulate output response by a ref. input • Combat the effect of disturbances on output
Other Examples • MEMS: lateral capacitive accelerometers in the design of a gyroscope system • Remote Sensing: synthetic aperture radar (SAR) to obtain high resolution images via FFT • Biomedical Processing: filtering to remove instrumental, biological, or analysis artifacts from signals of interest such as ECG, EEG, or other • Auditory System: complex means of sensitive frequency and volume discrimination from which to learn (model for artificial speech recognition)
Value of the Transfer Function in Each Field of Application • H = Y / X in the transform domain • Relates 3 fundamental quantities: if we know two, we can find the third! • If the system is a filter (ECS, BSP, etc.) • Know characteristics of the system (H) • Have a known (currupted?) input (X) • Can find the output simply since Y = H•X (in the transform domain)
Value of the Transfer Function in Each Field of Application • If our system is a bio-potential measurement probe, or sensor • Know characteristics of the probe or sensor if it is well calibrated (H) • Have a known electronic output signal (Y) • Desire the probe or sensor input (X) represents the measured quantity and can simply find this as X = H-1•Y
Value of the Transfer Function in Each Field of Application • In a diagnostic or remote sensing imaging application • Know the input (X) as transmitted signal • Have the output (Y) as received signal • Desire characteristics of the imaged system and can find this as H = Y-1•X • Thus, the transfer function (H) adapts its role to the need of the application
Manipulation of the Transfer Function • Depends on the process of Convolution • Applies to either the time or frequency domain • Convolution in the time domain that connects the output to the input of a system directly corresponds to simple multiplication in the frequency (transform) domain that greatly facilitates input-output relations
In ENGR 365 • Learning principles and tools of Linear Systems applicable to multiple fields • In the lab: testing out techniques on audio signals using MATLAB • On Wed. 2/1, please meet in the F166 lab for orientation & MATLAB Introduction !! • Collaborate but do 1 report/student on Lab #1 • MATLAB scripts will also be required to complete certain HW problems
After ENGR 365 • By the conclusion of this course, you should at least know how to • Select coefficients for the digital version of any of the basic filter types (LP, HP, BP, BS) • Be able to simulate the performance of your proposed design with MATLAB • NOT Implement on a dedicated DSP and/or design more advanced adaptive filters since falls beyond the scope of this course, limited to an Introduction to Digital Signal Processing