Download
1 / 22
230 likes | 288 Views
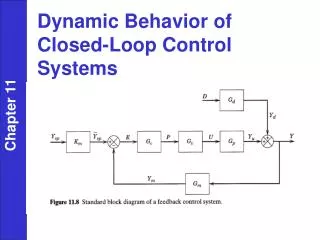
This project presents closed-loop control of a Halbach Array magnetic levitation system, with a focus on height adjustment. The research includes an overview of previous work, project summary, design equations, and equipment list. The technology is applied in various fields, prominently in high-speed trains. The project aims to model and control the magnetic levitation system for improved efficiency and performance.

E N D
Closed Loop Control of Halbach Array Magnetic Levitation System Height By: Kyle Gavelek Victor Panek Christopher Smith Advised by: Dr. Winfred Anakwa Mr. Steven Gutschlag
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References • Introduction • Previous Work • Project Summary • Halbach Array • Inductrack • Maglev System • Design Equations • Preliminary Work • Design Tasks • Halbach Array Model • DC Motor Model • Controller Model • uController and Flat Track • Equipment List • Schedule • Patents • References
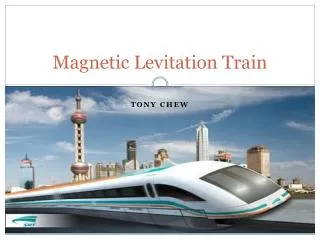
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References Maglev technology is applied in various fields today, most prominently in high speed trains.
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References • Dr. Richard Post • Fundamental research in the field of magnetic levitation while at the Lawrence Livermore National Laboratory. He designed the inductrack in the 1990’s. • Paul Friend (2004) • Determination of levitation equations and successful design of MATLAB GUI software. The GUI software will be used to predict the results with variable input values.
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References • Glen Zomchek (2007) • Design and fabrication of inductrack levitation system which achieved .45mm vertical displacement. • Dirk DeDecker and Jesse VanIseghem (2012) • Re-design of inductrack levitation system with successful vertical displacement of 3.7mm from a starting displacement of 5.0mm
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References Current rotary inductrack system
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References • The objective of CLCML is to model the precious year’s magnetic levitation system and implement closed loop control of the magnetic levitation height.
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References Sinusoidal magnetic field generated below the Halbach array. Magnetic fields created by Halbach array magnet configuration. B0 = Peak Magnetic Field d = Thickness of magnet Br = Individual Magnet’s Strength M = # of magnets per wavelength
Closed Loop Control of Halbach Array Magnetic Levitation System Height The copper inductrack is fastened to the outside of the rotating wheel making it a rotary inductrack. Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References Φ = Magnetic Flux L = Inductrack Inductance I = Current R = Inductrack Resistance λ = magnetic field wavelength k = wave number = 2π/λ y = vertical distance w = width ω = kv v = ωmr = Tangential Velocity B0 = Peak Magnetic Field
Closed Loop Control of Halbach Array Magnetic Levitation System Height Inherent Track Properties Passing Halbach Array’s Magnetic Field Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References This animation displays the relationship between velocity of a rotary inductrack with a Halbach array as velocity increases.
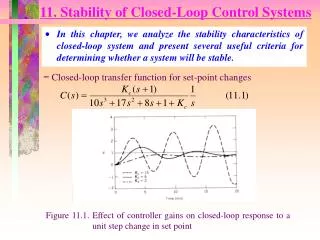
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References As shown above the pole occurs at ω = -R/L
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References L = Inductrack Inductance μ0 = Permeability of free space = 4π H/m λ = Wavelength of magnetic field PC = Mean Perimeter of Inductrack dC = Spacing of Inductors R = Inductrack Resistance RC = Resistivity of Copper = 1.68 x 10-8 Ωm ℓ = Length of Inductrack A = Inductrack Cross-sectional Area B0 = Peak Magnetic Field d = Thickness of magnet Br = Individual Magnet’s Strength M = # of magnets per wavelength
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References Using the design equations shown previously, the following values have been calculated in previous work. The accuracy of these values shall be tested through experimentation. B0 = 0.8060 T R = 1.9 x 10-5 Ω L = 7.532 x 10-8 H
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References Fy = Vertical Force B0 = Peak Magnetic Field w = Width of Inductrack k = Wave Number = 2π/λ ω = kv v = ωmr = Tangential Velocity y = vertical distance
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References ωm = machine rotational speed b = Motor Viscous Friction IA = Armature Current RA = Armature Resistance VS = Source Voltage TC = Columbic Friction KT = KV = Torque Constant = Velocity Constant JA = Moment of Inertia
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References Controller Design Specifications: • The maximum overshoot of the system shall be <10%. • The steady state error shall be less than 0.02 cm. • The rise time shall be minimized. • The settling time shall be less than 50 ms* *The settling time specification may need to be modified based on the motor’s capabilities.
Closed Loop Control of Halbach Array Magnetic Levitation System Height μController Specifications: Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References • Accept a user-defined levitation height through keypad input. • Calculate the vertical displacement of the Halbach array device with a displacement transducer. • Calculate an error signal by subtracting the system displacement with the desired displacement from the keypad. • Calculate the voltage required by the DC motor to achieve the desired displacement based on the transfer function of the closed loop. • Sample displacement not sooner than the settling time (50ms). • All calculations within 1ms. Circular Track Design Specifications: • The track shall accommodate linear motion of the Halbach array until break velocity is reached. • The track shall be designed to minimize break velocity. • The track shall be designed to minimize leakage flux and eddy currents.
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References Equipment List: Lexan sheets for protective enclosure μController capable of meeting required specifications Materials for fabrication of circular track Materials for fabrication of new Halbach array
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References The safety enclosure and all modeling shall be completed before winter break. During winter break each group member will complete some individual work.
Closed Loop Control of Halbach Array Magnetic Levitation System Height • Richard F. Post • Magnetic Levitation System for Moving Objects • U.S. Patent 5,722,326 • March 3, 1998 • Richard F. Post • Inductrack Magnet Configuration • U.S. Patent 6,633,217 B2 • October 14, 2003 • Richard F. Post • Inductrack Configuration • U.S. Patent 629,503 B2 • October 7, 2003 • Richard F. Post • Laminated Track Design for Inductrack Maglev System • U.S. Patent Pending US 2003/0112105 A1 • June 19, 2003 • Coffey; Howard T. • Propulsion and stabilization for magnetically levitated vehicles • U.S. Patent 5,222,436 • June 29, 2003 • Coffey; Howard T. • Magnetic Levitation configuration incorporating levitation, • guidance and linear synchronous motor • U.S. Patent 5,253,592 • October 19, 1993 • Levi;Enrico; Zabar;Zivan • Air cored, linear induction motor for magnetically levitated • systems • U.S. Patent 5,270,593 • November 10, 1992 Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References • Lamb; Karl J. ; Merrill; Toby ; Gossage; Scott D. ; Sparks; • Michael T. ;Barrett; Michael S. • U.S. Patent 6,510,799 • January 28, 2003
Closed Loop Control of Halbach Array Magnetic Levitation System Height Introduction Previous Work Project Summary Halbach Array Inductrack Maglev System Design Equations Preliminary Work Design Tasks Equipment List Schedule Patents References [1] Dirk DeDecker, Jesse VanIseghem. Senior Project. “Development of a Halback Array Magnetic Levitation System”. Final Report, May 2012 [2] Glenn Zomchek. Senior Project. “Redesign of a Rotary Inductrack for Magnetic Levitation Train Demonstration.” Final Report, 2007. [3] Paul Friend. Senior Project. Magnetic Levitation Technology 1. Final Report, 2004. [4] Post, Richard F., Ryutov, Dmitri D., “The Inductrack Approach to Magnetic Levitation,” Lawrence Livermore National Laboratory. [5] Post, Richard F., Ryutov, Dmitri D., “The Inductrack: A Simpler Approach to Magnetic Levitaiton,” Lawrence Livermore National Laboratory. [6] Post, Richard F., Sam Gurol, and Bob Baldi. "The General Atomics Low Speed Urban Maglev Technology Development Program." Lawrence Livermore National Laboratory and General Atomics.