Download
1 / 28
290 likes | 359 Views
This chapter discusses the use of occupancy grids, Bayesian methods, and exploration strategies in robot localization and mapping. It covers the difference between iconic and feature-based localization, updating occupancy grids with Bayesian, DS, or HIMM methods, and formal exploration techniques. The text explores the challenges and techniques involved in localization, the importance of accurate measurements, and the integration of global and local maps. The chapter also delves into the concepts of iconic and feature-based localization, occupancy grids, sonar models, and Bayesian updating methods.

E N D
Chapter 11:Localization and Map Makinga. Occupancy Gridsb. Evidential Methodsc. Exploration Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary
Objectives • Describe the difference between iconic and feature-based localization • Be able to update an occupancy grid using either Bayesian, DS, or HIMM • Describe the two types of formal exploration strategies Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Behaviors Behaviors Behaviors Behaviors Navigation • Where am I going? Mission planning • What’s the best way there? Path planning • Where have I been? Map making • Where am I? Localization Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Carto- grapher Mission Planner deliberative How am I going to get there? reactive Chapter 11: Localization and Map Making
Motivation • Can make topological or metric maps, localize relative to landmark(s) or at any point • More desirable: metric maps, localize at any point • More readable by a human • GPS isn’t the answer • Localization error is on order of 1 meter • Reception difficult indoors • Want to know where features in environment are, not just robot (e.g., layout of walls, not just robot’s path) • Sensor measurements have some uncertainty that must be factored in • Formal methods called “evidential reasoning”, “theories of evidence” Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Basic Idea • Sense and create a local map • Move a little • Record change in position, orientation • Sense and create a local map • Fuse/tile together Integrate local map Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Global map Local map Move D Chapter 11: Localization and Map Making
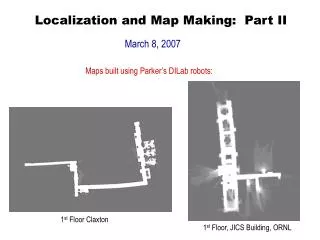
Observations about Process • Map is almost always a type of regular grid (because easier to visualize) • The “Move D” and “Integrate local map” are the hard part. • Integration requires accurate measurement of D (on order of inches and <=5 degrees) Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Black Is ground Truth, Purple is Measured Using shaft Encoders for D Chapter 11: Localization and Map Making
Iconic vs. Feature-Based • Issue is how to localize at each step to accurately measure D, then integrate local map • Iconic: use raw (or near raw) sensor readings • Match elements marked “empty” or “occupied” in a regular grid • OCCUPANCY GRID • Plug and chug, intense computations • Feature-based: use features extracted from raw data • Label and match corners, walls, whatever • Less features, so less computations Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Occupancy Grids • Type of regular grid • L: eLement • Came out of sonar tradition • Each element is marked with belief that L is empty or occupied • Usually a number on a scale • [0,1] for probability and possibility theories • [0-15] for HIMM Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Sonars and Occupancy Grids • Everything element L “under” the sonar beam gets marked with some value for empty, occupied • Exact value depends on • Sonar model • Evidential method • Generic sonar model • 3 regions • R: theoretical range, r: measured range • b: half angle Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Evidential Methods for Occupancy Grids • Bayesian • Popularized by Hans Moravec • Dempster-Shafer • HIMM • Johan Borenstein Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Bayesian • Compute the value for each L for each sonar using sonar model • The value of L is a probablility • Compute the value for each L where sonars overlap uses Bayes’ rule for updating Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Example: Value of L in Region II Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Class Exercise:Value of L in Region I Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Other Issues • An element L may have multiple “hits” • Robot moves and senses subset of same area, Sonars overlap: what to do? • Use Bayes’ rule to update • If write a program to use Bayes’ rule, what’s the initialization of the occupancy grid? • P(Occupied)=P(Empty)=0.5 • Is this a good assumption? Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Summary • Localization and map making are intertwined • Localization requires good maps • Map making requires good localization • Map making and localization techniques often use occupancy grids • Type of regular grid • Elements represent uncertainty of being empty, occupied • Multiple ways of combining uncertainty when an element has multiple “hits” Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Dempster-Shafer Theory & HIMM • On board Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Localization • Iconic: uses raw sensor data directly • Ex. Sonar and laser readings fused in an occupancy grid • Compare current and past reading • Feature-based: uses features extracted from sensor data • Ex. “corners”, “walls” Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary ? Chapter 11: Localization and Map Making
Iconic Example: ARIEL • Issues • k must be small to be tractable, but k must be large if noisy sensors • Doesn’t work with “just sonars” Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Iconic Example: ARIEL Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Results Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Exploration • Can explore reactively (move to open area as per Donath), but we’d like to create maps • Two major methods • Frontier-based • GVG Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Frontier Based Exploration • Robot senses environment • Borders of low certainty form frontiers • Rate the frontiers • Centroid • Utility of exploring (big? Close?) • Move robot to the centroid and repeat • (continuously localize and map as you go) Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
GVG Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Keeps moving, ignores areas hard to get too Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Reaches deadend at 9, backtracks Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Goes back and catches missing areas Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Discussion of Exploration • Both methods work OK indoors, not so clear on utility outdoors • GVG • Susceptible to noise, hard to recover nodes • Frontier • Have to rate the frontiers so don’t trash Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making
Summary • Map making requires • Localization and acurate measurements • Exploration • Localization and map making often use • Occupancy grids • Evidential methods for updating • Bayesian • DS • HIMM (quasi-evidential) • Two kinds of localization: iconic, feature-based • Two popular methods for exploration: frontier-based, GVG Overivew Occupancy Grids -Sonar Models -Bayesian Updating -Dempster-Shafer -HIMM Localization -ARIEL Exploration -Frontier-based -GVG Summary Chapter 11: Localization and Map Making