MAE 242: DYNAMICS
MAE 242: DYNAMICS. Instructor Dr. Samir N. Shoukry Professor, MAE & CEE. assistants K. Mc Bride Dhananjy Rao Dony Oomen. http://cw.prenhall.com/hibbeler/medialib/studypak/index.html Login Name: htkau Password: y2k3. Key to a grade of A in MAE242.

MAE 242: DYNAMICS
E N D
Presentation Transcript
MAE 242: DYNAMICS Instructor Dr. Samir N. ShoukryProfessor, MAE & CEE assistants K. Mc BrideDhananjy RaoDony Oomen http://cw.prenhall.com/hibbeler/medialib/studypak/index.html Login Name: htkau Password: y2k3
Key to a grade of A in MAE242 • Attend all classes and pay full attention in each class and ask questions. BEFORE YOU COME TO CLASS YOU MUST READ THE RELATED MATERIAL. • Solve all the book example problems following each class. YOU MUST do using pencil and paper; JUST REDING IS A WASTE OF TIME. • SOLVE ALL HOMEWORK PROBLEMS: IF YOU CANNOT SOLVE A PROBLEM GO AND ASK QUESTIONS UNTILL YOU SOLVE THE PROBLEM ON YOUR OWN. • KEEP TIDY RECORD OF THE SOLUTIONS. • ALWAYS VISIT ESB115 and Ask me, William or McBride. • REMEMBER: NO ONE WILL EXPLAIN THIS MATERIAL BETTER THAN DR. Shoukry , Dr. William, or Mr. McBride • YOU HAVE A GREAT OPPORTUNITY …. USE IT.
How motion is described? Kinematics is the science of characterizing motion Kinetics looks into the forces that cause the motion DISTANCE? POSITION? VELOCITY? ACCELERATION?
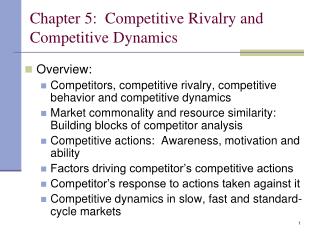
P If the time of travel is t , the average speed is: DISTANCE To describe the distance of travel, we need to define a reference point. The ball traveled a distance S from a reference point P. Is distance a vector quantity? How the position of P may be defined?
Position Position is defined by a vector that originates from an origin. The vector is called POSITION VECTOR. The origin may be selected at any convenient point.
Speed Example: Your average speed from Morgantown to New York was 70 miles/hour. On your way you took a speeding ticket for speeding at a velocity of 92.5 miles/hour. Morgantown New York So, What is Velocity?
instantaneous change in position Velocity = dr Change in time = dt Velocity While your average speed on the trip was 70 MPH, your speed varied from 5 MPH driving out of your garage, to 92.5 MPH when you where caught speeding at mile post 36 on I68. Velocity is an instantaneous vector that describes the rate of change in position with respect to time. Δs r r’ Velocity is a VECTOR quantity
r d v = t d r D Velocity = v = lim t D 0 t O O O Position, Speed, and Velocity A particle moves from P to P’ in Δt seconds Δr is the change in position vector r in Δt seconds The magnitude v of the VECTOR v is the speed of the particle. Since Δr=PP’, as t0 the distance PP’ Δs. Thus, the average speed: The VELOCITY VECTOR is always TANGENT to the path
instantaneous change in velocity dv Acceleration = = Change in time dt Acceleration and Deceleration We enter I79 at speed of 45 MPH. Since the allowed speed limit is 70 MPH; one increases the velocity of his car. While a Cadillac can accelerate to 79 MPH in 6 seconds a Subaru reaches the same velocity in 15 seconds. Driving at 85 MPH, a police car spotted; the driver reduce his speed to 65 MPH in 16 seconds. He was spotted speeding at 82 MPH. Acceleration is a vector that describes the rate of change in velocity with respect to time. Acceleration is a VECTOR quantity
dr = = dt dt v dr dv = = = = v dt dt dr dr v a dv dr = = dt dt = = v r a dt dv = = a dv v a dt dt = dr dv = = r a dt Position, Velocity, & Acceleration
dv = Integrate = Separate variables f(t) = f(t) dt dv v + C f(t) dt dt = + C ) r ( f(t) dt dt + C’ dv v2 Integrate = Separate variables = v f(r) = + C f(r) dr vdv f(r) dr dr 2 dr dr 1 = v=f(r) = dr t= dt + C’ dt f(r) f(r) Inverse Problem 1. Acceleration is a time function i.e: a=f(t) 2. Acceleration is a time position i.e: a=f(r)
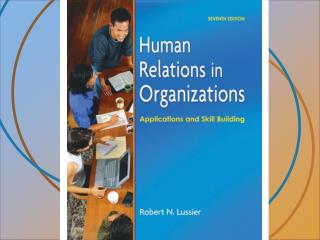
C -1.5 0.5 2.5 0 A B
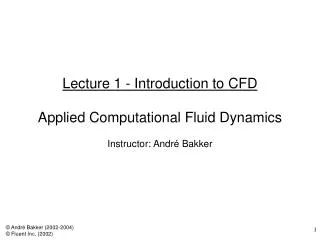
-25 ft 7 ft -18 ft Total distance=7+(7-(-25))-(-25-(-18))=46 ft