Understanding Tesla's Earthquake Machine: Exploring Harmonic Oscillators and Resonance
This research investigates Tesla's Earthquake Machine, an early harmonic oscillator designed to resonate with large structures and potentially trigger oscillatory motion, including earthquakes. We explore the Q-Factor, which measures resonance sharpness, using the Torsional Harmonic Oscillator device for experiments. Our study focuses on the relationships between rotational inertia, damping, and the transient versus steady-state behaviors of oscillatory systems. By examining these principles, we aim to enhance engineering designs to prevent structural failures like the Tacoma Narrows Bridge.

Understanding Tesla's Earthquake Machine: Exploring Harmonic Oscillators and Resonance
E N D
Presentation Transcript
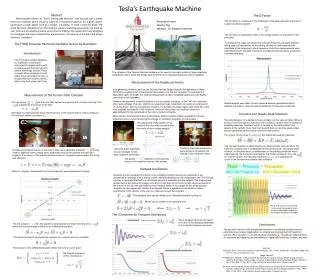
Tesla’s Earthquake Machine Abstract What became known as "Tesla's Earthquake Machine" was actually just a simple harmonic oscillator which could be tuned to a resonant frequency for a given object, particularly a large object such as a bridge, a building, or even a tectonic plate. The small harmonic vibrations from the machine create a standing wave which can build up over time and eventually produce some intense shaking. Our experiment was designed to investigate the science behind this phenomenon, the science of damped and driven harmonic oscillators. The Q Factor Amanda Hunter Jeremy Rys Mentor: Dr. Edward Deveney The Q-Factor is a measure of the sharpness of the peak resonant response of a given oscillatory system. The Q-Factor is essentially a ratio of the energy stored ε to the power P lost per cycle. To measure this response around the resonant frequency we experimented with a range of frequencies for the driving oscillations and measured the amplitude of the response to each frequency. Extra fine measurements were performed around the peak resonance to enhance data resolution around the resonant frequency. The (THO) Torsional Harmonic Oscillator Device by TeachSpin Introduction The Torsional Oscillator Machine by TeachSpin is a precision instrument for experimenting with resonances and the basic physics behind how things vibrate. These concepts allow engineers to build better shock absorbers for cars, or bridges that don't shake violently when a big truck goes over them. The collapse of the Tacoma Narrows bridge was the result of resonant growth of large-amplitude oscillations, which shook the bridge back and forth at it’s resonant frequency until it collapsed. Measurement of the Rotational Inertia In engineering problems, such as the Tacoma Narrows Bridge disaster, the geometry of mass distribution is where most of the physics takes place. Just like the frequency of a pendulum is dependent upon it’s length, the resonant frequencies of other oscillating systems too are highly restricted by their geometry. However the geometry of real life objects, such as bridges, buildings, or the THO rotor shaft are often quite complex. The rotor shaft in our experiment was comprised of a variety of components of varying mass, density, and spatial orientation. Fortunately the large copper disc at the top of the rotor supplies the majority of the rotational inertia for the system, so it makes a good first approximation for the magnitude of the rotor’s moment of inertia. More precise measurements were conducted by adding a series of brass quadrants of known rotational inertia ∆I and measuring the change in oscillation frequency for the system. Measurement of the Torsion Fiber Constant The net torque on the rotor-fiber system is proportional to a linear restoring force supplied by the torsion in the fiber. We began by measuring the linear restoring force of the torsion fiber in order to measure the torsionalstiffness constant . Measurements were taken for two separate damping parameters which affected the width or range as well as amplitude of frequency responses. Transient and Steady State Solutions The initial behavior of a damped driven oscillator can be quite complex. When a driving force first begins to operate on an oscillatory system there is a period of instability called the “transient” which is caused by the initial position and velocity of the system. Over time this transient dies out, and the steady state solution generated by the driving force is all that remains. The total inertia of the system is the inertia of the rotor shaft assembly plus the inertia of the n added weights. For a given driving force , the differential equation becomes The transient solution is determined by the initial position and velocity of the harmonic oscillator and is independent of the driving force. The steady state solution, on the other hand, is independent of the starting conditions and is determined by the driving force as well as the motion constants and for a given system. The resulting waveform is a superposition (sum) of the transient and steady-state solutions. Attaching the brass quadrants in pairs allows us to balance the change in the rotational inertia. Using the brass quadrants we can compute ∆I that each quadrant contributes To balance the lateral forces on the torsion fiber, two suspended masses were used on opposite sides to apply even, balanced forces on the system at exact right angles to the radius r of the cylindrical piece shown in the picture above where the string was attached. Mass vs. angular displacement for this arrangement were graphed accordingly: The period depends on the restoring torque & the rotational inertia of the system Damped Oscillations Damping forces counteract the motion of an oscillating system causing the amplitude of the oscillations to decrease over a period of time. Variable damping can be introduced to the THO through a series of magnets attached to a retractable assembly resembling brake calipers. The magnets are spaced above and below the copper rotor disc so that they do not touch but will cause resistance in the motion of the disc through eddy currents induced inside of the copper by the still positioned magnets. As the copper disc rotates, the magnets induce a resistance force which is linearly proportional to the velocity of the rotor as it passes through the magnets. This damping term can be added to our differential equation giving us: Which can be written in the standard form The driving force was terminated at the end of the graph to show the natural oscillation frequency and exponential decay envelope Where and The 3 Solutions for Damped Oscillations The 3 damped solutions are based on a ratio of the damping parameter to the angular frequency squared. The net torque on the system is proportional to a linear restoring force which can be rearranged in the form of a differential equation, This takes the form of the Helmholtz equation for a simple harmonic oscillator The solution to this differential equation takes the form of a sine wave The angular frequency of this sine wave is: Conclusions The equations which model the physical behavior of oscillating systems have an extremely large range of applications in science and engineering from electrical systems (RLC Circuits) to civil and structural engineering. Through an understanding of resonance and damping we are helping to create safer buildings, bridges, and cars. Sources: Van Baak, David. Torsional Oscillator Intructor's Manual. Vol. 1 and 2. Buffalo, NY: TeachSpin, 2008. Print. TO1-A. <http://www.TeachSpin.com> Image Sources: Photographer Unknown. Howard Clifford Running off the Tacoma Narrows Bridge during Collapse, Tacoma, Washington. Digital image. University of Washington Tacoma Narrows Bridge Collection. 7 Nov. 1940. Web. 17 Apr. 2012. < http://content.lib.washington.edu/u?/farquharson,27 >. Bashford and Thompson. Tacoma Narrows Bridge midsection collapsing into the waters of the Tacoma Narrows. Digital image. University of Washington Tacoma Narrows Bridge Collection. 7 Nov. 1940. Web. 17 Apr. 2012. <http://content.lib.washington.edu/u?/farquharson,19>