Non-Gaussian Data Fusion System (NGDFS)
Non-Gaussian Data Fusion System (NGDFS). Daniel H. Wagner Associates, Inc. - www.wagner.com.

Non-Gaussian Data Fusion System (NGDFS)
E N D
Presentation Transcript
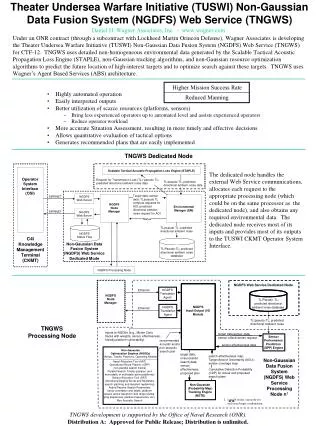
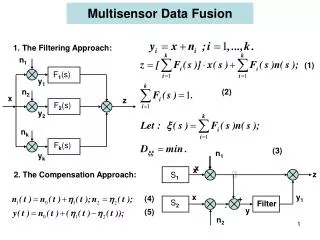
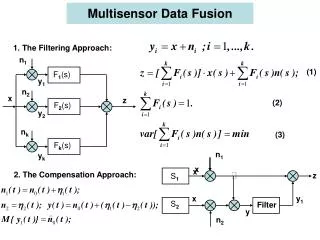
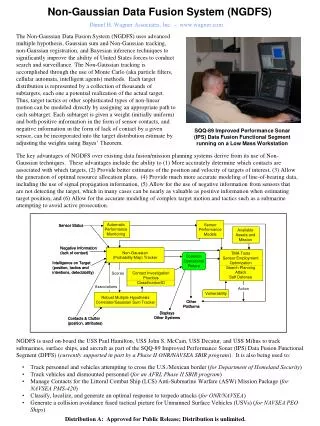
Non-Gaussian Data Fusion System (NGDFS) Daniel H. Wagner Associates, Inc. - www.wagner.com The Non-Gaussian Data Fusion System (NGDFS) uses advanced multiple hypothesis, Gaussian sum and Non-Gaussian tracking, non-Gaussian registration, and Bayesian inference techniques to significantly improve the ability of United States forces to conduct search and surveillance. The Non-Gaussian tracking is accomplished through the use of Monte Carlo (aka particle filters, cellular automata, intelligent agents) methods. Each target distribution is represented by a collection of thousands of subtargets, each one a potential realization of the actual target. Thus, target tactics or other sophisticated types of non-linear motion can be modeled directly by assigning an appropriate path to each subtarget. Each subtarget is given a weight (initially uniform) and both positive information in the form of sensor contacts, and negative information in the form of lack of contact by a given sensor, can be incorporated into the target distribution estimate by adjusting the weights using Bayes’ Theorem. SQQ-89 Improved Performance Sonar (IPS) Data Fusion Functional Segment running on a Low Mass Workstation The key advantages of NGDFS over existing data fusion/mission planning systems derive from its use of Non-Gaussian techniques. These advantages include the ability to (1) More accurately determine which contacts are associated with which targets, (2) Provide better estimates of the position and velocity of targets of interest, (3) Allow the generation of optimal resource allocation plans, (4) Provide much more accurate modeling of line-of-bearing data, including the use of signal propagation information, (5) Allow for the use of negative information from sensors that are not detecting the target, which in many cases can be nearly as valuable as positive information when estimating target position, and (6) Allow for the accurate modeling of complex target motion and tactics such as a submarine attempting to avoid active prosecution. NGDFS is used on-board the USS Paul Hamilton, USS John S. McCain, USS Decatur, and USS Milius to track submarines, surface ships, and aircraft as part of the SQQ-89 Improved Performance Sonar (IPS) Data Fusion Functional Segment (DFFS) (currently supported in part by a Phase II ONR/NAVSEA SBIR program). It is also being used to: • Track personnel and vehicles attempting to cross the U.S./Mexican border (for Department of Homeland Security) • Track vehicles and dismounted personnel (for an AFRLPhase II SBIR program) • Manage Contacts for the Littoral Combat Ship (LCS) Anti-Submarine Warfare (ASW) Mission Package (for NAVSEA PMS-420) • Classify, localize, and generate an optimal response to torpedo attacks (for ONR/NAVSEA) • Generate a collision avoidance fused tactical picture for Unmanned Surface Vehicles (USVs) (for NAVSEA PEO Ships) Distribution A: Approved for Public Release; Distribution is unlimited.
Near-Real-Time Data Fusion (NRTDF) Testbed Daniel H. Wagner Associates, Inc. - www.wagner.com NRTDF is a full-capability data fusion engine that utilizes both linear (Kalman Filter) and non-linear (Monte Carlo) tracking models. The Kalman filter is used for all tracks and is supplemented by the Monte Carlo model for high-interest and/or low reporting rate targets. NRTDF has been used to fuse MTI radar data and SIGINT reports as well as air radar data and undersea warfare data. The Fusion Testbed has been created to test and demonstrate the NRTDF for different scenarios. The testbed has an easy-to-use GUI and database (yellow) that allows an analyst to quickly and easily create, modify, store, and run scenarios with the correlator. It also has high-fidelity sensor simulations for radar, ESM, acoustic and other sensors, along with a special modules to evaluate the performance of the correlator (red). The components of the NRTDF correlator are the input processor, the multiple-hypothesis correlator and Kalman Filter tracker, the Non-Gaussian tracker, a sensor optimizer, and an output process (green). The core of the NRTDF is a Multi-Hypothesis correlator, called MATCH, that can handle multiple sensor types, multiple platforms, out-of-sequence reports, and both kinematic and attribute-based sensors. The importance of multiple hypothesis method is important because it allows MATCH to correct improper associations quickly. When an association is ambiguous, MATCH creates multiple hypotheses and holds the most likely ones in memory. The most likely hypothesis is displayed to the operator but, when new data indicate a change, the correct hypothesis is quickly substituted. The example shown below, created in the testbed, demonstrates this capability. There are two friendly ships with ESM capability both reporting to a common correlator. There are two hostile ships with emitting radars, beyond radar range of either friendly. Both friendly ships gain passive contact on both enemies. When tracking begins, the correlator picks the wrong pair of intersections. Because both lines of bearing cross at two locations, there are two hypotheses for which pair of intersections reflects the two real targets. After a short time, the motion information makes the other pair of intersections more likely and MATCH switches the scenarios immediately. NRTDF was supported by a Phase II SBIR from NSWC Dahlgren Division. Distribution A: Approved for Public Release; Distribution is unlimited.
Operational Route Planner (ORP) Daniel H. Wagner Associates, Inc. - www.wagner.com ORP was initially designed to find near-optimal, environmentally responsive, search paths for anti-submarine warfare. ORP can design paths for either acoustic or non-acoustic sensors. The criterion for optimality is the cumulative detection probability (CDP) against a target obeying a given, probabilistic, motion model. The problem of allocating search effort against a moving target was essentially solved in 1980, under the simplifying assumption that effort could be spread arbitrarily across the search region (Brown, 1980). ORP addresses the much harder problem where the searcher is constrained to a physically realizable path. The searcher-path problem is known to be NP-hard (i.e., at least as hard as the traveling salesman problem), and no computationally feasible solutions are known to any NP-hard problem (many researchers believe such solutions to be impossible). ORP uses a genetic algorithm (GA) to find near-optimal plans. A GA mimics the process of evolution. The first step is to define an encoding of trial solutions into chromosomes (strings of tokens, or genes) and a fitness function. Each chromosome defines an individual. The fitness function is some transformation of the objective function (CDP in this case). The initial population consists of many randomly generated individuals (trial solutions). Succeeding generations are formed by selecting parents (with probability proportional to their fitness), randomly interchanging portions of their chromosomes to form children, and randomly mutating some of the children’s genes. As in nature, the overall fitness of the population tends to grow with successive generations. Mannually Designed ORP-Generated CDP = 0.472 CDP = 0.475 A moderately simple problem: Red = 10 nm range Blue = 1 nm range Fixed starting point ORP evaluates the fitness function (CDP) by a Monte Carlo simulation of the target’s motion model. The model can be a simple random tour, or it can include sophisticated patrol and transit tactics. For acoustic searches, ORP obtains signal excess from detailed acoustic predictions provided by Navy standard acoustic models. The models can account for inhomogeneous, non-isotropic environments. For magnetic anomaly detection (MAD), ORP uses a detailed internal model for the MAD signal, given the Earth’s local magnetic field and the magnetic characteristics of the submarine. ORP combines the signal calculation with atmospheric noise values (ap index) and geomagnetic noise maps provided by NRL/SSC to obtain a probability of detection on each search leg. These are combined to yield CDP. A representative (relatively complex) example is illustrated below. Colors indicate sweep width (2 times mean detection range) Fixed starting point Blue = standard ladder search Green = best ladder path of 500 random orientations and spacings Black = ORP track ORP development has been supported by the Naval Research Laboratory, Stennis Spacecenter (NRL-SSC) and the Office of Naval Research and is currently supported by NAVAIR and the NAVSEA Undersea Warfare-Decision Support System (USW-DSS) program. Distribution A: Approved for Public Release; Distribution is unlimited.