Model Error and Parameter Estimation
Explore model bias and parameter estimation using a state augmentation approach with emphasis on effective degrees of freedom. Current research projects include precipitation assimilation and carbon cycle data assimilation. Collaborate to develop diagnostic tools for new model development. Investigate information content analysis and quantify the value added of new observations. Future directions involve determining effective degrees of freedom in ensemble-based data assimilation systems.

Model Error and Parameter Estimation
E N D
Presentation Transcript
Model Error and Parameter Estimation Dusanka Zupanski CIRA/Colorado State University Fort Collins, Colorado Joint NCAR/MMM CSU/CIRA Data Assimilation Workshop Boulder, CO, September 19, 2005 • Outline • State augmentation approach • Issues of model error estimation - Degrees of freedom of model error - Information content of available data • Current research projects • Future research directions and collaborations Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
State Augmentation Approach (Zupanski and Zupanski 2005, MWR) - Dynamical model for standard model state x - Dynamical model for model error (bias) b - Dynamical model for empirical parameters Define augmented state vector w , . And augmented dynamical model F Find optimal solution (augmented analysis) waby minimizing J (MLEF method): Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
Issues of Model Error (and Parameter) Estimation State augmentation increases the size of the control variable More Degrees of Freedom (DOF)! Do we need more ensembles? Do we need more observations? What is the number of the effective DOF of an ensemble-based data assimilation and model error estimation system? Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
What is the number of the effective DOF? Answer can be obtained by using the following 3 components within a general framework: • Ensemble Data Assimilation + • State Augmentation + • Information theory Degrees of freedom (DOF) for signal (Rodgers 2000; Zupanski et al. 2005) C - information matrix in ensemble subspace Shannon information content, or entropy reduction Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
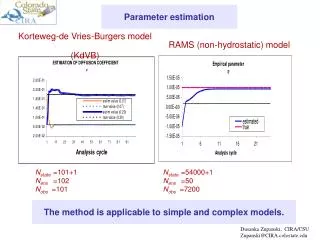
Information Content AnalysisGEOS-5 Single Column Model Nstate =80; Nobs =80 ds measures effective DOF of an ensemble-based data assimilation system (e.g., MLEF). Useful for addressing DOF of the model error. Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
BIAS ESTIMATION, KdVB model NEGLECT BIAS BIAS ESTIMATION (vector size=101) BIAS ESTIMATION (vector size=10) NON-BIASED MODEL It is beneficial to reduce degrees of freedom of the model error.
Current Research Projects • Precipitation Assimilation (NASA) • Apply MLEF to NASA GEOS-5 column precipitation model • Address model error and parameter estimation • (In collaboration with A. Hou, S. Zhang - NASA/GMAO, C. Kummerow - CSU/Atmos. Sci. Dept.) • GOES-R Risk Reduction (NOAA/NESDIS) • Evaluate the impact of GOES-R measurements in applications to severe weather and tropical cyclones • Information content of GOES-R measurements • (In collaboration with M. DeMaria - CIRA/NOAA/NESDIS, • T. Vonder Haar, L. Grasso, M. Zupanski - CSU/CIRA) • Carbon Cycle Data Assimilation (NASA) • Apply MLEF to various carbon models (LPDM, SiB3, PCTM, and SiB-CASA-RAMS) • Assimilate carbon concentrations globally and locally • Address model error and parameter estimation • (In collaboration with S. Denning, M. Uliasz, K. Gurney, L. Prihodko, R. Lokupitiya, I. Baker, K. Schaefer - CSU/Atmos. Sci. Dept., • M. Zupanski - CSU/CIRA) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
Future Research Directions and Collaborations • Model bias and parameter estimation requires collaboration • Learning about model errors and uncertainties of different dynamical models • Developing diagnostic tools for new model development • Information content analysis • Quantify value added of new observations (e.g., GPM, CloudSat, GOES-R, OCO) • Determine effective DOF of an ensemble-based data assimilation system • Cross-over the existing scientific boundaries • Apply ensemble-based framework to different science disciplines (e.g., atmospheric, oceanic, ecological, hydrological sciences) • General, adaptive, algorithmically simple algorithm opens new possibilities Discuss issues for collaboration with NCAR/MMM • Model errors and parameter estimation for WRF model • Information content analysis - effective DOF of WRF data assimilation system Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu