Download
1 / 31
310 likes | 524 Views
ELVIS , ELVILA and PRISCILLA The Humanoid Robots. Peter Nordin, Mats Nordahl, Krister Wolff, Andreas Magnusson, Anders Eriksson Presented by Ramakrishna Gundapaneni. A peek at Humanoid development. Humanoid projects in Recent years COG, KISMET (MIT) from 1993

E N D
ELVIS, ELVILA and PRISCILLAThe Humanoid Robots Peter Nordin, Mats Nordahl, Krister Wolff, Andreas Magnusson, Anders Eriksson Presented by Ramakrishna Gundapaneni
A peek at Humanoid development • Humanoid projects in Recent years • COG, KISMET (MIT) from 1993 • ASIMO (Honda) at work from Jan 2002 at NMESI (evolved from P3) • Anthropomorphic Principle • Developmental Organization • Social interaction • Embodiment and Adaptivity
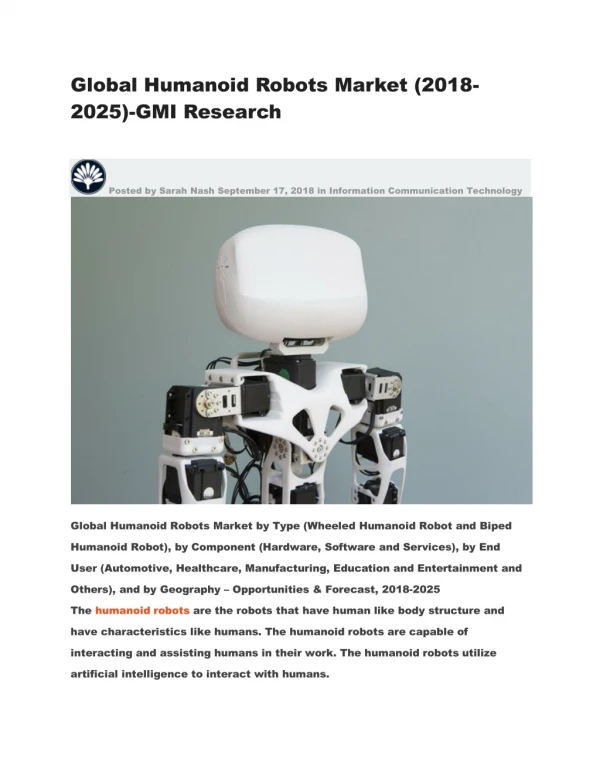
Elvis, Elvina and Priscilla • Developed at Chalmers University of Technology, Sweden • With the Aim of • Creating Robots that carry out Human functions, • Work in real world • And are controlled by evolutionary adaptive methods (Design principle)
Elvis, Elvina and Priscilla Con.. • ELVIS first in the series • ELVINA I and II added for additional experiments • ELVIS and ELVINA act as prototypes • Priscilla is the full size humanoid • ALL the robots have participated in Robocup - 2002
ELVIS: Characteristics • Height: about 70 cm • 42 standard servos • DOF(Degrees of freedom) : 45 • Sensors: Microphones, Cameras and touch sensors etc. • Built in PC and power supply • Goal: Serving as prototype for Priscilla
ELVINA: Characteristics • Height: 28 cm • Weight: 1490 g • DOF(Degrees of freedom): 14 • Sensors: Cameras, near – infrared PSD (position sensitive detector) • Built in PC and power supply • Goal: Serving as prototype for Priscilla and Socialize with other prototype
Priscilla: Characteristics • Height: 180 cm • Plastic skeleton with titanium reinforcements • Linear electric actuators • Built in PC and power supply • Immediate Goal: Walk with normal human walking speed and execute simple actions like pick, sit, stand and kick etc. • Ultimate Goal: Embody human cognition to perform functions of human autonomously
Environment • Dynamic • Non-deterministic • Inaccessible • Continuous • Present working Environment: • Chalmers Physical Resource Lab • Soccer Stadium, Fukuoka and)
Sensing Capabilities • Sensors: • Cameras, Microphones • Touch sensors • PSD, Balance Sensors(gyros)
Actions • Actions: • Low level motor commands • Balance, Walk, Watch, Listen • Navigate • Watch • Walk • Manipulate • Watch • Rise Hand • Pick things
Drives • Humanoids are still in experimental stage, complete drives not built • Drives built on Ad hoc basis for test platform • Drives built during Robocup 2002 • Have Balance • Control ball • Shoot goal
Action Selection Mechanism • Several Behavioral modules control robot’s behavior • Behavioral modules are learnt using natural selection and reinforcement learning • Architecture consists of • Reactive Layer • Model Building Layer • Reasoning Layer
Control Architecture • Reactive Layer • Reactive behavioral modules (balancing) • Evolves machine code of modules online • Feedback received directly from humanoid • Model Building Layer • Evolves a model of problem and underlying hardware based on past events • Reasoning Layer • Evolution used as inference engine for higher brain functions
Evolving Balancing behavior • Uses both Reactive and Model Building layer • Reactive Layer evolves the machine code program that controls the actuators • Model Building layer checks hypotheses to allow only less pressure on mechanical parts • Fitness criterion is taken from inputs • Pressure sensors • Gyros
Genetic algorithm, in brief • Evolves machine code of c compiler • Build initial population • Select four members from population • Each member should • Read input • Execute the individual and store results • Send output to system controller
Genetic algorithm contd.. • Sleep for some time for feedback • Read input again and compute fitness • Replace two worst performing individuals with copies of two best ones • Do Mutation and crossover on the offspring • Repeat cycle
Evolving Hand-Eye Coordination • Train the Humanoid before it evolves a inverse kinematics • Recognize object through vision • Evolve the recognition behavior • Approximately locate the position of object (Feedback from two cameras) and arm servos • Vector of arm controller actuator set points is determined (Input from PSD) • Each arm contains four servos
Hand – Eye Coordination Con.. • Inverse kinematics function is evolved for each of robot’s arm’s servos • Discipulus machine code GP product starts with initial populations of functions • Tournament as explained above is followed with squared error of reaching position and actual position used as fitness • Weak functions replaced by fittest and tournament repeated until desired function is evolved
Evolving Gait in Humanoid • Evolving gait is complex for bipedal robots using traditional methods • Center of gravity should fall in the binding polygon of feet • Gait cycle is representing by sum of vectors and a constant indicating time for cycle • First Vector represents starting position and last vector last position in gait cycle • Each vector consists of a set of integer values used as control parameters servos at that position
Evolving gait contd.. • Sets out with initial set of individuals • Tournament selection is used • Selects a individual • Uses on board camera and PSD to measure distance from current position to target • Executes gait cycle using control parameters in vectors • Once cycle is finished, calculates current distance from target and time elapsed
Evolving gait contd.. • Finds out how straight it traveled and velocity of travel • Uses Straightness and velocity as fitness parameters • Evaluates individual and repeats cycle for three more individuals • Fittest two individuals are replaced by weakest individuals
Conclusions • Building Humanoids is highly complex and takes great number of man years (COG project started in summer 1993 and still progressing) • Although Humanoids presented (ELVIS and co.) are not fully operational, they provide a general purpose architecture which can be used in development of humanoids
References • Banzhaf W., and Nordin J.P., (1997) An On-Line Method to Evolve Behavior and to Control a Miniature Robot in Real time Genetic Programming. • Langdon, W.B., Nordin J.P., (2001) Evolving Hand-Eye Coordination for a Humanoid Robot with Machine Code Genetic Programming. In proceeding of EuroGP 2001 • Nordin J.P., Nordahl M. (1999) An Evolutionary Architecture For a Humanoid Robot, In Proceedings of: The Fourth International Symposium on Artificial Life and Robotics • Wolff, K., and Nordin J.P.,(2001). Evolution of Efficient Gait with Humanoids using Visual Feedback. In the proceedings of the 2nd IEEE-RAS International Conference on Humanoid Robots, Humanoids 2001.