
Enhancing NCS Performance with Hybrid Scheduler: A TDA Approach
Investigating a hybrid scheduler, Traffic-Division Arbitration (TDA), for Networked Control Systems (NCS) to improve system stability and performance with simulations and error analysis. Analyzing how TDA differs from the Try-Once-Discard protocol.

Enhancing NCS Performance with Hybrid Scheduler: A TDA Approach
E N D
Presentation Transcript
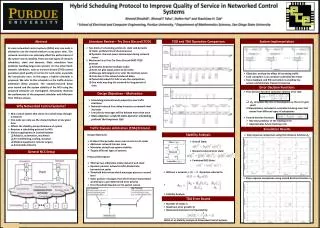
Abstract Literature Review – Try Once Discard (TOD) TOD and TDA Operation Comparison System Implementation In many networked control systems (NCSs) only one node is allowed to use the shared medium at any given time. This network constraint can adversely affect the performance of the system and its stability. There are two types of network schedulers, static and dynamic. Static schedulers have problems handling large-scale systems. On the other hand, dynamic schedulers, such as try-once discard (TOD) cannot guarantee good quality of service for each node, especially the low-priority ones. In this paper, a hybrid scheduler is proposed. We refer to this scheduler as the traffic-division arbitration (TDA) protocol. The network-induced delay error bound and the system stability of the NCS using the proposed scheduler are investigated. Simulations illustrate the performance of the proposed scheduler and difference from TOD are shown. • Two kinds of scheduling protocols: static and dynamic • Static: predetermined channel access • Dynamic: channel access determined during network access • Maximum Error First-Try Once Discard (MEF-TOD) protocol • Arbitrates between multiple nodes • Does not give equal access to all nodes • Message with largest error wins the medium access • Error due to the network-induced delay • Packet discarded if it fails to win the competition • One node may hog the network for long period of time • Objective: analyze the effect of increasing traffic • Each subsystem is an armature-controlled DC motor • State-feedback and PID controllers to stabilize the system and eliminate transient response Error Decision Functions • First decision function computes relative error rate: • computes the rate of convergence as the error gets small • Denominator included to normalize tracking error that comes from different types of subsystems • Second decision function: • One step predictor of the tracking error • Approximates future tracking error Design Objectives – Motivation • Scheduling protocols work properly in low traffic situations • Network-induced time delay increases as network load increases • Low priority messages will be delayed more than once • Main objective: a hybrid static-dynamic scheduling protocol that improves QoS Why Networked Control Systems? • NCS: control system that closes its control loops through a network • One node can only use the shared medium at any given time • Affects the stability and performance of system • Requires a scheduling protocol for NCS • Various applications in Control Systems • Robotics, automation, machinery • Air conditioning, cooling, elevators • Medical equipment, remote surgery • Automobile industry Traffic Division Arbitration (TDA) Protocol Simulation Results Stability Analysis • Design Objectives: • Protocol that provides more even access for all nodes • Addresses network fairness issue • Maintains closed-loop system stability • Targets different types of systems • Protocol Description: • TDA has two arbitration levels; dynamic and static • Dynamic portion: network traffic divided into transmission cycles • Threshold determines which messages passes to second level • Static portion: messages from the first level transmitted according to a pre-determined error priority • Error threshold depends on the system nature • Step response comparison using first decision function • Overall State: • Network-induced error state: • Combined NCS State: General NCS Setup • Without a network, Dynamics reduced to: • Stability Analysis • Number of nodes: k • Maximum error growth: β • Networked induced error bounded by: • Step response comparison using second decision function TDA Error Bound _________________________________ Walsh et al, Stability Analysis of Networked Control Systems.


















