Introduction To 8096 Microcontroller
Its a simple introduction to 8096 microcontroller useful for graduate students

Introduction To 8096 Microcontroller
E N D
Presentation Transcript
8096 MICROCONTROLLERS Dr. Y. Narasimha Murthy Ph.D Department of Electronics. Sri Sai Baba National College(Autonomous) ANANTAPUR-515001-A.P-INDIA
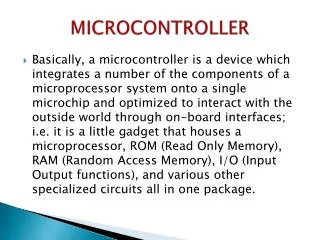
SALIENT FEATURES • INTEL 8096 , a second generation processor belongs to MCS 96 family. This is a high performance 16 bit microcontroller with register to register architecture. • This is designed to handle high speed calculations and fast input/output operations which is preferred in high speed modern control applications.
The 8096 with 16-bit CPU horse power ,high speed math processing and high speed I/O is ideal for complex motor control and axis control systems. Hence it is used in 3 phase large horse power AC motors and robotics • The 10-bit ADC option makes it most suitable candidate for data acquisition systems and closed loop analog controllers.
8096 can be configured in two modes. (i) Single chip mode and (ii) Expanded mode In the single chip mode the internal ROM or EPROM is accessed by making the pin EA (Active low) HIGH. For ROM less chip to access the external memory the pin EA is made low. • In the expanded mode both internal and external (OFF CHIP) memory can be accessed using the multiplexed bus architecture
It has nearly 230 bytes of on-chip RAM and one 10-bit A/D converter with sample hold circuit. • There are five on chip I/O ports each of 8-bit width • The 8096 bit microcontroller has a complete set of 16-bit arithmetic instructions including multiply and divide operations. • It has Pulse Width Modulation Output with dedicated Baud Rate Generator • It has one on chip Full Duplex Serial Port • There are 20 interrupt sources and 8 interrupt vectors on 8096..
It has two 16-bit Timers Timer 1 and Timer 2 and one 16 bit watch dog timer • This 8096 is available as 48 pin DIP(Dual In-line Package) and 68 pin PLCC and also 68 pin leadless chip carrier IC. It is also available as a 68 pin PGA(Pin Grid Array) package.
ARCHITECTURE • INTEL 8096 is a 16-bit microcontroller in which the data path for operands is 16 bits wide i.e when data is transferred between RAM or ROM and the CPU, it is transferred 16 bits per internal memory cycle. • The 8096 has an internal 8-bit address bus and can access 28 addresses.
The 8096 performs most of the calculations in RALU. The RALU contains • A 17 bit ALU • One 16 bit program status word (PSW) • One program counter(PC) • A loop counter and • 3 temporary registers. All registers are 16 bit or 17 bit wide. A separate incrementor is used for the Program Counter.
PSW Register • Z is the zero flag • N is the negative flag • V is the overflow flag • VT is the overflow Trap flag • C is the carry flag • I is the global interrupt enable flag • ST is the sticky bit, it is set during a right shift
contd… • Two of the temporary registers have their own shift logic. • The addressable memory space on the 8096 is 64 kB, most of which are available to the user for program or data memory .The locations which have special purpose are 0000H through 00FFH and 1FFFH through 2010H.All other locations can be used either for program or for data storage or for memory mapped peripherals.
The 8096 has been designed for high speed /high performance control applications. Because the 8096 architecture is different from that of the 8048 or 8051 • The architecture of 8096 has two major sections one is the CPU section and the other is the I/O section. The block diagram is shown in the next slide
CPU OF 8096 • The 8096 CPU has a 16-bit ALU which operates on a 256-byte register file instead of an accumulator. • Any of the locations in the register file can be used for sources or destinations for most of the instructions. Hence this is called a register to register architecture. • Many of the instructions can also use bytes or words from anywhere in the 64K byte address space as operands.
Locations 00h through 17H are the I/O control registers or special function registers(SFRs) • Locations 18H and 19H contain the stack pointer which serves as general purpose RAM when not performing the stack operations. • The remaining bytes of the register file serves as general purpose RAM ,accessible as bytes,words or double-words.
Calculations performed by the CPU takes place in the RALU .This RALU contains a 17 bit ALU ,the program status word (PSW),the program Counter(PC),a loop counter and three temporary registers. • The RALU operates directly on the register files, thus eliminating the problem with Accumulator and providing direct control of I/O operations through the SFRs.
I/O FEATURES • Most of the I/O features on the 8096 are designed to operate with little CPU intervention. • The Watchdog Timer is an internal timer which can be used to reset the system if the software fails to operate properly. • The Pulse-Width-Modulation (PWM) output can be used as a rough D to A, a motor driver, or for many other purposes..
Contd.. • The A to D converter (ADC) has 8 multiplexed inputs and 10-bit resolution. The serial port has several modes and its own baud rate generator. • The High Speed I/O section includes a 16-bit timer, a 16-bit counter, a 4-input programmable edge detector, 4 software timers, and a 6-output programmable event generator
PWM OUTPUT • Analog outputs are just as important as analog inputs when connecting to a peripheral device. True digital to analog converters are difficult to make on a microcontroller because of all of the digital noise and the necessity of providing an on chip, relatively high current, rail to rail driver. They also take up a fair amount of silicon area which can be better used for other features. The A to D converter does use a D to A, but the currents involved are very small.
Contd.. • The PWM signal is a variable duty cycle, fixed frequency waveform that can be integrated to provide an approximation to an analog output. The frequency is fixed at a period of 64 microseconds for a 12 MHz clock speed. • Controlling the PWM simply requires writing the desired duty cycle value (an 8-bit value) to the PWM Register.
General Purpose I/O PORTS There are five 8-bit I/O Ports namely Port 0, Port 1, Port 2, Port 3 and Port 4 Port 0 is only an Input port which is also used as the analog input port for the on chip ADC. So, if the analog input features are not used ,the Port 0 Can be used as input port only
PORT 1 This is a quasi bidirectional port which can be used either as input or as the out port. It is mapped It is mapped at the memory address 0FH. If any of the port 1 pin is to be used as input port the corresponding pin must be made high by writing the data 1
The weak internal pullup is designed to be overridden by the external device which drives the line. When the output drive capability is sufficient to drive a 74LSxx Input,a CMOS device driven by port1 will require a pullup resistor of around 10K to +5V in order to bring the output up well above the normal CMOS threshold voltage of 2.5 volts.Port1 inputs can be driven by either CMOS or TTL devices with no extra parts.
PORT 2 • The Port 2 has four input lines, two output lines and two quasi bidirectional I/O lines as shown in the Fig. One or more of these six lines can be used for alternate purpose of PWM ,RXD,TXD, Timer 2 Inputs etc..
PORT3 & PORT 4 The Port3 & Port4 are similar in use . Both of them have open drain outputs. By writing 1 to any line it can be used as an input and other lines can serve as output lines. (Contd… )
Each output line require a pullup resistor of about 15K.In the expansion mode ,the bus lines can gain the ability to drive both high and low ,forming the expansion bus without the need of pullup resistors.
RESETS AND SELFPROTECTION OPTIONS • When the reset pin is driven to low the 8096, regardless of what it is doing will reset and start executing from the address 2080H.The reset pin is a bidirectional line with a strong internal pullup .This line may also be driven by internal watchdog timer also.
The INTEL 8096 microcontroller is provided with on chip self protection circuitary , to protect the chip from large currents. The chip is automatically reset when the Vdd deviates from the prescribed levels. Diode circuits are provided on the chip itself ,which gives self protection.
HIGH SPEED INPUT UNIT • This unit is used to record the time at which an external event occurs with respect to timer 1. It can monitor four independently configurable HSI lines and capture the value of Timer 1 when an event takes place. There are 4 lines (HIS.0-HIS.3)available in this unit .The HIS unit can store upto 8 entries(Timer 1 values) • .
Contd.. • The HSI unit can generate an interrupt when loading an entry into the HIS holding register or loading the sixth entry into the FIFO. • The four types of events that can trigger captures include “rising edges only”, ”falling edges only”,” rising or falling edges” or every eighth rising edge.
HIGH SPEED OUTPUT UNIT • This HSO unit is used to trigger events at specified times based on Timer 1 or Timer 2 with minimal CPU over-head. The 4 events are • Starting an A/D conversion • Resetting of Timer2 • Setting four software flags • Switching six output lines (HSO.0-HSO.5)
Contd…. • The HSO unit stores pending events and the specified time s in a Content Addressable Memory(CAM) file. • This CAM file stores up to 8 commands. Each command specifies the action time,the nature of the action ,whether an interrupt is to occur and whether Timer 1 or Timer 2 is the reference Timer. For every 8 state times the HSO compares the CAM locations for the time matches.
The HSO unit can generate two types of interrupts • (i) HSO execution interrupt (Vector = 2006H) • (ii) Software Timer interrupt(Vector =200BH)
TIMERS • INTEL 8096 controller has two on chip 16-bit timers TIMER 1 & TIMER 2 • TIMER 1 can act as a 16-bit counter also and can be clocked at every 2 ms.i.e for every 8-internal clock cycles. • This Timer is used in conjunction with high speed I/O system. • When Timer 1 is over flown ,the interrupt bit is enabled or disabled
Contd.. • TIMER 2 can be used as a 16-bit even counter which is clocked by a signal coming into the chip on either of the two pinsPort2.3 or HSI.1 • The choice between the two clock sources is made by setting or clearing bit 7 of the IOC.0 • Timer 2 is counted on both the rising edges and falling edges of the input signal and the minimum time between edges is 2 micro seconds.
WATCH DOG TIMER • An on chip 16-bit watch dog timer is available in 8096 which helps to recover the controller from the software upsets. • This 16-bit WDT is a counter which is incremented every state time. This counter is cleared by program after periodic interval and not allowed to overflow . However , if the program does not progress properly by any reason such as Electrostatic Discharge(ESD) or due to any hardware related problems ,the overflow occurs. And the hardware reset is initiated to restart the microcontroller
Contd…… • This process avoids the system from having a malfunction for longer than 16mS under 12MHz frequency operation • When the WDT overflows ,it pulls down the RESET pin for at least two state times resetting 8096 and also any other devices connected to the RESET line.
INTERRUPT STRUCTURE • There are 20 different interrupt sources that can be used on the 8096. The 20 sources vector through 8 locations or interrupt vectors. • All these interrupts are enabled or disabled using the 9 th bit of PSW register. If this bit is set to 1 all the interrupts are enabled and disabled when reset to zero.
Contd… • Control of the interrupts is handled through the Interrupt Pending Register (INT_PENDING), the Interrupt Mask Register (INT_MASK), and the I bit in the PSW (PSW.9). • The content of the interrupt mask register determine whether the pending interrupt is serviced or not. If it is to be serviced ,the CPU pushes the contents of the program counter on to the stack and and reloads it with the vector corresponding to the desired interrupt.
Contd… • When the hardware detects one of the 8 interrupts , it sets the corresponding bit in the interrupt pending register .This register can be read or modified as a byte register. • Individual interrupts can be enabled or disabled by setting or clearing the bits in the Interrupt mask register. The INT_MASK register can be accessed as the lower bits of the PSW register.
SERIAL PORT • The 8096 has an on-chip serial port to reduce the total number of chips required in the system . The serial port is similar to that on the 8051 controller. . It has one synchronous and three asynchronous modes. In the asynchronous modes baud rates of up to 187.5 K baud can be used, while in the synchronous mode rates up to 1.5 M baud are available.
Contd… • The chip has a baud rate generator which is independent of Timer 1 and Timer 2, so using the serial port does not take away any of the HSI, HSO or timer flexibility or functionality. • Control of the serial port is provided through the SPCON/SPSTAT (Serial Port CONtrol / Serial Port STATus) register.
Contd.. • The serial port is configured in four modes. The four modes of the serial port are referred to as modes 0, 1, 2 and 3. • Mode 0 is the synchronous mode, and is commonly used to interface to shift registers for I/O expansion. In this mode the port outputs a pulse train on the TXD pin and either transmits or receives data on the RXD pin. Mode 1 is the standard asynchronous mode, 8 bits plus a stop and start bit are sent or received.
Contd.. • Modes 2 and 3 handle 9 bits plus a stop and start bit. The difference between the two is, that in Mode 2 the serial port interrupt will not be activated unless the ninth data bit is a one; in Mode 3 the interrupt is activated whenever a byte is received. These two modes are commonly used for interprocessor communication
Contd… • Baud rates for all of the modes are controlled through the Baud Rate register. This is a byte wide register which is loaded sequentially with two bytes, and internally stores the value as a word. The least significant byte is loaded to the register followed by the most significant. • The most significant bit of the baud value determines the clock source for the baud rate generator. Ifthe bit is a one, the XTAL1 pin is used as the source, ifit is a zero, the T2 CLK pin is used.
ADDRESSING MODES • The 8096 instruction set supports six addressing modes. They are • Immediate addressing mode • Register direct addressing mode • Indirect addressing mode • Indirect with auto increment mode • Short indexed mode and • Long indexed mode
Contd… • These addressing modes increase the flexibility and overall execution speed of 8096 controller. Each instruction uses at least one of the addressing modes. The register ,direct and immediate addressing modes execute faster than the other addressing modes. • Both of the indirect addressing modes use the value in a word register as the address of the operand. • The indirect auto increment mode ,increments a word address by one after a byte operation and two after a word operation.
A to D CONVERTER • Analog inputs are frequently required in every microcontroller application . The 8096 controller has one 10 bit on chip A/D converter that can use any one of eight input channels. The conversions are done using the successive approximation method, and require 168 state times (42 microseconds with a 12 MHz clock.). • The main components of the A/D converter are • 8-analog input channels • One 8 to 1 multiplexer
Contd… • A sample and hold capacitor and • Resistor ladder • The A/D converter performs a conversion in 88 time states .Upon the completion of each conversion the converter can generate a conversion complete interrupt.
REFERENCES • 1.Design with Microcontrollers –John .B.Peatman –Mc.Graw-hill International Ed. • Intel Application note & data sheet.