Download
1 / 9
90 likes | 276 Views
Sistemi di riferimento. Dal “De Rerum Natura” di Lucrezio :.

E N D
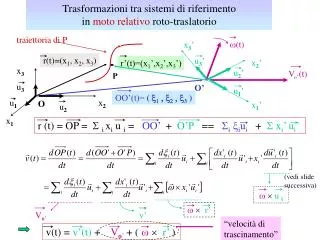
Sistemi di riferimento Dal “De Rerum Natura” di Lucrezio: La nave da cui siamo trasportati, si muove, mentre sembra star ferma;quella che rimane immobile all'ormeggio, si crede che proceda oltre.E sembra che a poppa fuggano colline e pianureoltre le quali conduciamo la nave e con le vele voliamo.Gli astri sembrano tutti restare immobili, fissialle eteree cavità, e tuttavia son tutti in assiduo movimento,giacché, dopo esser sorti, rivedono i lontani tramonti,quando hanno percorso il cielo col loro corpo lucente.E il sole e la luna parimenti sembra che rimanganoimmobili, essi che il fatto stesso mostra in movimento. Qua vehimur navi, fertur, cum stare videtur;quae manet in statione, ea praeter creditur ire.et fugere ad puppim colles campique videntur,quos agimus praeter navem velisque volamus. Sidera cessare aetheriis adfixa caverniscuncta videntur, et adsiduo sunt omnia motu,quandoquidem longos obitus exorta revisunt,cum permensa suo sunt caelum corpore claro.solque pari ratione manere et luna videturin statione, ea quae ferri res indicat ipsa. La descrizione del moto dipende dal sistema di riferimento scelto !!! Un sistema di riferimento è costituito da un insieme di corpi posti a distanze relative fisse Una descrizione matematica del sistema di riferimento si ottiene introducendo un sistema di coordinate che permettono di esprimere la posizione dei punti dello spazio rispetto agli oggetti di riferimento
y O x Coordinate cartesiane nel piano P2 P y P1 x • Si fissa un’origine e si introduce una coppia di assi cartesiani ortogonali x e y • Le coordinate (x,y) del punto P sono date dai segmenti OP1 e OP2
0 asse polare Coordinate polari nel piano P r φ • Si fissano un’origine e un asse polare • Le coordinate (r,φ)di un punto sono la distanza r del punto dall’origine e l’angoloφche la retta OP forma con l’asse polare • le coordinate polari variano nei range 0 ≤ r <+∞ e 0≤φ<2π • l’origine ha coordinatar=0e coordinataφ non definita
y P r y φ x x ≡ asse polare 0 Assumendo le origini coincidenti e che l’asse polare coincida con l’asse x si hanno le relazioni seguenti: Relazioni fra coordinate polari e cartesiane
z y O x Coordinate cartesiane nello spazio P3 P z y P2 x P1 P’ • Si fissano un’origine O ed una terna destrorsa di assi ortogonali x,y,z • Le coordinate (x,y,z) del punto P sono date dai segmenti OP1 , OP2 e OP3
Coordinate polari nello spazio (sferiche) asse polare • Si fissano un’origine, un asse polare ed un semipiano polare, delimitato dall’asse polare • Le coordinate polari (r,θ,φ)di un punto P sono il modulo r del raggio vettore OP, l’angolo θ che OP forma con l’asse polare (zenith) e l’angolo φ che il semipiano contenente P e l’asse polare forma con il semipiano polare (azimuth) P θ r O piano polare φ • le coordinate polari hanno range 0 ≤ r < +∞ , 0 ≤ θ≤πe 0 ≤ φ < 2π • i punti dell’asse polare hanno coordinata θ=0 (semiasse positivo) o θ=π (semiasse negativo) e coordinata φ non definita • L’origine ha coordinata r=0, mentre θ e φ non sono definite
z Assumendo che l’asse z coincida con l’asse polare ed il piano xz sia il piano polare si hanno le relazioni seguenti: P z θ θ r z y O y x φ y x Coordinate polari e coordinate cartesiane
Coordinate cilindriche asse polare • Si fissano un’origine, un asse polare ed un semipiano polare, delimitato dall’asse polare • Le coordinate cilindriche (r,φ,z) di un punto P sono la distanza r di P dal piano polare (PP’), l’angolo φ che il semipiano contenente P e l’asse polare forma col semipiano polare e la distanza z dall’origine della proiezione P’ di P sull’asse polare P’ r P z piano polare O r φ • Le coordinate cilindriche variano nei range 0 ≤ r < +∞ , 0 ≤ φ < 2π , -∞ < z < +∞ • I punti dell’asse polare hanno coordinata r=0 e coordinata φ non definita • L’origine ha coordinata r=0,φ non definita e z=0
z Assumendo che l’asse z coincida con l’asse polare ed il piano xz sia il piano polare, la coordinata z è la stessa. Per le altre coordinate si hanno le relazioni seguenti: P z z y O y x φ r y x Coordinate cilindriche e coordinate cartesiane