SOFTWARE RELIABILITY MODELING
SOFTWARE RELIABILITY MODELING. Pınar Sağlam Lecture : CMPE 516 Fault Tolerant Design. MOTIVATION. The percentage of using computer and computer systems is increasing day by day. Any f ailure on these systems can result in high monetary, property or human loss.

SOFTWARE RELIABILITY MODELING
E N D
Presentation Transcript
SOFTWARE RELIABILITY MODELING Pınar Sağlam Lecture: CMPE 516 Fault Tolerant Design
MOTIVATION • The percentage of using computer and computer systems is increasing day by day. • Any failure on these systems can result in high monetary, property or human loss. • Thus, more reliance is placed on the software systems it is essential that they operate in a reliable manner.
MOTIVATION • In order to increase the reliability of softwares, engineers have been working on Software Reliability area since the early 1970s.
OUTLINE • What is Software Reliability? • The relationship btw SW Reliability and SW Verification • Basic Definitions • Hardware Reliability vs. Software Reliability • Classification of SW Reliability Models -1 • Classification of SW Reliability Models -2 • Some examples of reliability models • Conclusion
Software Reliability What is Software Reliability? • Definition: ”The probability of failure-free operation if a computer program in a specified environment for a specified period of time.” (Musa & Okumoto) • Its aim: To quantify the fault-free performance of software systems
Software Verification The expected requirements of a software: • functionality • capability • installability • serviceability • maintainability • performance • documentation • usability • Software verification is a broad and complex discipline of software engineeringwhose goal is to assure that software fully satisfies all the expected requirements.
Software Reliability & Software Verification • Software reliability goes hand-in-hand with software verification •Input: collection of software test results •Goal:assess the validity of the softwaresystem
Software Reliability Assessment Figure 1: Software Reliability Assessment Process
Software Reliability Model Development Process Figure 2 - Flowchart for SW reliability modeling and decision making
Basic Definitons • Failures: A failure occurs when the user perceives that a software program ceases to deliver theexpected service. • Faults: A fault is the cause of the failure or theinternal error (e.g. an incorrect state). It is also referred as a “bug”. • Defects: When the distinction between fault and failure is not critical, “defect” can be used as ageneric term to refer to either a fault (cause) or a failure (effect). • Errors:1)A discrepancy between a computed, observed, or measured value or condition and thetrue, specified, or theoretically correct value or condition.2) A human action that results in software containing a fault. (the term “mistake” is used instead to avoid the confusion)
Basic Definitons • Failure Functions: When reliabiltiy quantities are defined with respect to time, failures can be expressed in several ways: • The cumulative failure function(also called themean-value function) denotes the expected cumulative failures associated with eachpoint of time. • The failure intensity functionrepresents the rate of change of thecumulative failure function. • The failure rate function(or called the rate of occurrence offailures) is defined as the probability that a failure per unit time occurs in the interval [t ,t + Dt], given that a failure has not occurred before t. • The mean time to failure (MTTF)function represents the expected time that the next failure will be observed. (MTTF isalso known as MTBF, mean time between failures.)
Basic Definitons • Mean Time to Repair and Availability: It represents theexpected time until a system will be repaired after a failure is observed. • Availability is the probability that a system is available when needed. Typically, it ismeasured by, • Operational Profile: The operational profile of a system is defined as the set of operations that the softwarecan execute along with the probability with which they will occur.
Hardware Reliability vs. Software Reliability Some of the important differences between software and hardware reliability are: • Failure does not occur if the software is not used. However in hardware reliability, material deterioration can cause failure even when the system is not in use. • In software reliability, failures are caused by incorrect logic, incorrect statements, or incorrect input data. In hardware reliability, failures are caused by material deterioration, random failures, design errors, misuse, and environmental factors. • Software failures are rarely preceded by warnings while hardware failures are usually preceded by warnings. • Software essentially requires infinite testing, whereas hardware can usually be tested exhaustively. • Software does not wear out, and hardware does.
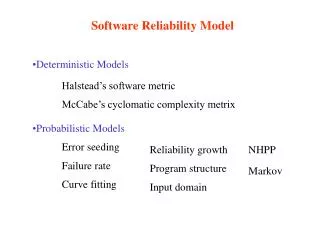
Classification of SW Reliability Models - 1 • There are lots of different classification schemas of SW Reliability Models. • One of these classification schemas: SW Reliability Models can be categorized into two types of models: • Deterministic Models • Probabilistic Models
Classification – Deterministic Models • Represent a quantitative approach to the measurement of computer software. It is used to study: • The elements of a program by counting the number of operators, operands and instructions. • The control flow of a program by counting the branches and tracing the execution path. • The data flow of a program by studying the data sharing and data passing.
Classification – Deterministic Models • There are two models in the deterministictype: • Halstead's software science model: to estimate the number oferrors in the program, • McCabe's cyclomatic complexity model: to determine an upper bound on the number of tests in a program.
Classification – Probabilistic Models • Represent the failure occurrences and the fault removals asprobabilistic events. • It is divided into different groups of models: • Error seeding 6. Execution path • Failure rate 7. Program structure • Bayesian and unified 8. Markov • Nonhomogeneous Poisson process • Input domain
Probabilistic Models – Error Seeding • Error Seeding • Estimates the number of errors in a program by using the capture-recapture sampling technique. The capture-recapture sampling technique: • Errors are divided into indigenous errors and induced errors (seeded errors). • The unknown number of indigenous errors is estimated from the number of induced errors and the ratio of the two types of errors obtained from the debugging data.
Probabilistic Models – Failure Rate 3. Failure Rate • It is used to study the functional forms of the per-faultfailure rate and program failure rate at the failure intervals. • Models included in this group are the • Jelinski and Moranda De-Eutrophication • Schick and Wolverton
Probabilistic Models – Reliability growth • Reliability Growth • Measures and predicts the improvement of reliability through the debugging process. • A growth function is used to represent the progress. • Models included in this group are the • Duane growth • Weibull Growth
Probabilistic Models – Program Structure • Program Structure • Views aprogram as areliability network. • A node represents a module or a subroutine, and the directed arc represents the program execution sequence among modules. • By estimating the reliability of each node, the reliability of transition between nodes, the transition probability of the network, and assuming independence of failure at each node, the reliability of the program can be solved as a reliability network problem.
Probabilistic Models – Program Structure • Models included in this group are the • LittlewoodMarkov structure • Cheung's user-oriented Markov
Probabilistic Models – Input Domain • Input Domain • Uses run (the execution of an input state) as the index of reliability function. • The reliability is defined as the number of successful runs over the total number of runs. • Models included in this group are the • Basic input-domain • Input-domain based stochastic.
Probabilistic Models – Execution Path • Execution Path • Estimates software reliability based on theprobability of executing a logic path of theprogram and the probability of anincorrect path. • This model is similar to the input domain model because eachinput state corresponds to an execution path. • The model forming this group is the • Shooman decomposition
Probabilistic Models – Execution Path • Nonhomogeneous Poisson Process • Provides ananalytical framework for describing the software failure phenomenon duringtesting. • The main issue in the NHPP model is to estimate the mean valuefunction of the cummulative number of failures experienced up to a certain timepoint. • Models included in this group are the • Musa exponential • Goel and Okumoto NHPP
Probabilistic Models – Markov • Markov • Is a general way of representing the software failureprocess. The number of remaining faults is modeled as a stochastic countingprocess. • If we assume that the failurerate of the program is proportional to the number of remaining faults, the two models are available: • linear deathprocess: assumes that the remaining error is nonincreasing • linear birth-and-death process: allows faults to be introduced during debugging.
Probabilistic Models – Markov • Continuous time discrete state Markov chain The state of the process is the number of remaining faults, and time-between-failures is the sojourning time from one state to another.
Probabilistic Models – Markov • Nonstationary Markov model • The model is very richand unifies many of the proposed models. • The nonstationary failure rate propertycan also simulate the assumption of nonidentical failure rates of each fault. • Models included in this group are the • Linear death with perfect debugging • Linear death with imperfect debugging • Nonstationary linear death with perfect debugging • Nonstationary linear birth-and-death
Probabilistic Models – Bayesian and Unified • Bayesin and Unified • Assume a prior distribution of the failure rate. • These models are used when the software reliability engineer has a good feeling about the failure process, and the failure data are rare.
Classification of SW Reliability Models - 2 • There is any other classification for SW Reliability Models. • Models fall into two classes, depending upon the types of data I. Modeling the times between successive failure of the software II. Modeling the number of failures of the software up to a given time.
Classification of SW Reliability Models - 2 • Time between failure models • Geometric • Jelinski-Moranda • Littlewood-Verrall • Musa-Basic • Musa-Okumoto
Classification of SW Reliability Models - 2 • Failure Count models • Schneidewind • Shick-Wolverton • Yamada S-shaped
Geometric Model • No upper bound on the number of failures. • The failure detection rate forms a geometric progression z(t)=Dφi-1 where 0<φ<1
Jelinski-Moranda Model • Similar to the Geometric model except assumes the progression is proportional to the remaining number of faults rather than a constant.
Littlewood-Verrall Model • This model makes the assumption that fault correction is imperfect, therefore new faults will be generated as ones discovered are fixed.
Musa Basic Model • Uses execution time rather than calendar time. • 0 is equal to the number of faults in the system and 1 is a fault reduction factor.
Musa-Okumoto Model • Differs from basic Musa in that it reflects the view that the earlier discovered failures have a greater impact on reducing the failure intensity function than those encountered later.
Schneidewind • Assumes that the current fault rate might be a better predictor of the future behaviour than the observed rate in the distant past • Three forms of the model that reflect the analyst’s view of the importance of the data as functions of time. • Model 1: All the data points are of equal importance • Model 2: Ignore the fault counts completely from the first through the s-1 time periods • Model 3: Use the cumulative fault counts from the intervals 1 to s-1 as the first data point.
Shick-Wolverton • Assumes the expected number of failures in any time interval is proportional to the fault content at the time of testing , and the time elapsed since the last failure. • Z(t|ti-1) = (N-i+1)β(t+ti-1) t Є [ti-1 , ti) Where N is the number of faults
Yamada S-shaped • The software error detection process is desribed as an S-shabed growth curve to reflect the initial learning curve at the beginning, as test team become familiar with software, followed by growth and then leveling off as the residual faults become more difficult to uncover • Assumes the mean value function and failure intensity follow a gamma distribution
Conclusion • Software reliability is the probability that a system functions without failure for a specified time in a specified environment • Software Reliability models try to encourage the reliability level of the software. • There is no single model that can be used in all situations. “There is no a silver-bullet!”
REFERENCES • Energy Citatitions Database http://www.osti.gov/energycitations/purl.cover.jsp;jsessionid=CE7D0E16AE9C5411F84656C31F73AE5E?purl=/6017897-Rc1ams/ • Software Reliability Modeling Nozer D. Singpurwalla and Simon P. Wilson http://www.jstor.org/pss/1403763